
Sharing data and computing in the cloud allows data users to focus on data analysis rather than data access. Open Data on AWS helps you discover and share public open datasets in the cloud. The Registry of Open Data on AWS hosts a large amount of public open data. The datasets range from genomics to climate to transportation information. They are well structured and easily accessible. Additionally, you can use these datasets in machine learning (ML) model development in the cloud.
In this post, we demonstrate how to extract buildings and roads from two large-scale geospatial datasets: SpaceNet satellite images and USGS 3DEP LiDAR data. Both datasets are hosted on the Registry of Open Data on AWS. We show you how to launch an Amazon SageMaker notebook instance and walk you through the tutorial notebooks at a high level. The notebooks reproduce winning algorithms from the SpaceNet challenges (which only use satellite images). In addition to the SpaceNet satellite images, we compare and combine the USGS 3D Elevation Program (3DEP) LiDAR data to extract the same.
This post demonstrates running ML services on AWS to extract features from large-scale geospatial data in the cloud. By following our examples, you can train the ML models on AWS, apply the models to other regions where satellite or LiDAR data is available, and experiment with new ideas to improve the performances. For the complete code and notebooks of this tutorial, see our GitHub repo.
Datasets
In this section, we provide more detail about the datasets we use in this post.
SpaceNet dataset
SpaceNet launched in August 2016 as an open innovation project offering a repository of freely available imagery with co-registered map features. It’s a large corpus of labeled satellite imagery. The project has also launched a series of competitions ranging from automatic building extraction, road extraction, to recently published multi-temporal urban development analysis. The dataset covers 11 areas of interest (AOIs), including Rio de Janeiro, Las Vegas, and Paris. For this post, we use Las Vegas; the images in this AOI cover 216km2 areas with 151,367 building polygon labels and 3,685km road labels.
The following image is from DigitalGlobe’s SpaceNet Challenge Concludes First Round, Moves to Higher Resolution Challenges.

USGS 3DEP LiDAR dataset
Our second dataset comes from the USGS 3D Elevation Program (3DEP) in the form of LiDAR (Light Detection and Ranging) data. The program’s goal is to complete the acquisition of nationwide LiDAR to provide the first-ever national baseline of consistent high-resolution topographic elevation data, collected in a timeframe of less than a decade. LiDAR is a remote sensing method that emits hundreds of thousands of near-infrared light pulses each second to measure distances to the Earth. These light pulses generate precise, 3D information about the shape of the Earth and its surface characteristics.
The USGS 3DEP LiDAR is presented in two formats. The first is a public repository in Entwine Point Tiles (EPT) format, which is a lossless, full resolution, streamable octree structure. This format is suitable for online visualization. The following image shows an example of LiDAR visualization in Las Vegas.

The other format is in LAZ (compressed LAS) with requester-pays access. In this post, we use LiDAR data in the second format.
Data registration
For this post, we select the Las Vegas AOI where both SpaceNet satellite images and USGS LiDAR data are available. Among SpaceNet data categories, we use the 30cm resolution pan-sharpened 3-band RGB geotiff and corresponding building and road labels. To improve the visual feature extraction performance, we process the data by white balancing and convert it to 8-bit (0–255) values for ease of postprocessing. The following graph shows the RGB value aggregated histogram of all images after processing.

Satellite images are 2D images, whereas the USGS LiDAR data are 3D point clouds and therefore require conversion and projection to align with 2D satellite images. We use Matlab and LAStools to map each 3D LiDAR point to a pixel-wise location corresponding to SpaceNet tiles, and generate two sets of attribute images: elevation and reflectivity intensity. The elevation ranges from approximately 2,000–3,000 feet, and the intensity ranges from 0–5,000 units. The following graphs show the aggregated histograms of all images for elevation and reflectivity intensity values.

Finally, we merge either one of the LiDAR attributes and merge them with the RGB images. The images are saved in 16-bit because LiDAR attribute values can be larger than 255, the 8-bit upper limit. We make this processed and merged data available via a publicly accessible Amazon Simple Storage Service (Amazon S3) bucket for this tutorial. The following are three samples of merged RGB+LiDAR images. From left to right, the columns are RGB image, LiDAR elevation attribute, and LiDAR reflectivity intensity attribute.

Creating a notebook instance
SageMaker is a fully managed service that allows you to build, train, deploy, and monitor ML models. Its modular design allows you to pick and choose features that suit your use cases at different stages of the ML lifecycle. SageMaker offers capabilities that abstract the heavy lifting of infrastructure management and provide the agility and scalability you desire for large-scale ML activities with different features and a pay-as-you-use pricing model.
The SageMaker on-demand notebook instance is a fully managed compute instance running the Jupyter Notebook app. SageMaker manages creating instances and related resources. Notebooks contain everything needed to run or recreate an ML workflow. You can use Jupyter notebooks in your notebook instance to prepare and process data, write code to train models, deploy models to SageMaker hosting, and test or validate your models. For different problems, you can select the type of instance to best fit each scenario (such as high throughput, high memory usage, or real-time inference).
Although training the deep learning model can take a long time, you can reproduce the inference part of this post with a reasonable computing cost. It’s recommended to run the notebooks inside a SageMaker notebook instance of type ml.p3.8xlarge (4 x V100 GPUs) or larger. Network training and inference is a memory-intensive process; if you run into out of memory or out of RAM errors, consider decreasing the batch_size in the configuration files (.yml format).
To create a notebook instance, complete the following steps:
- On the SageMaker console, choose Notebook instances.
- Choose Create notebook instance.
- Enter the name of your notebook instance, such as
open-data-tutorial. - Set the instance type to 8xlarge.
- Choose Additional configuration.
- Set the volume size to 60 GB.
- Choose Create notebook instance.
- When the instance is ready, choose Open in JupyterLab.
- From the launcher, you can open a terminal and run the provided code.
Deploy environment and download datasets
At the JupyterLab terminal, run the following commands:
$ cd ~/SageMaker/$ ./setup-env.sh tutorial_env
$ git clone https://github.com/aws-samples/aws-open-data-satellite-lidar-tutorial.git
$ cd aws-open-data-satellite-lidar-tutorialThis downloads the tutorial repository from GitHub and takes you to the tutorial directory.
Next, set up a Conda environment by running setup-env.sh (see the following code). You can change the environment name from tutorial_env to any other name.
$ ./setup-env.sh tutorial_envThis may take 10–15 minutes to complete, after which you have a new Jupyter kernel called conda_tutorial_env, or conda_[name] if you change the environment name. You may need to wait a few minutes after conda completion and refresh the Jupyter page.
Next, download the necessary data from the public S3 bucket hosting the tutorial files:
$ ./download-from-s3.shThis may take up to 5 minutes to complete and requires at least 23 GB of notebook instance storage.
Building extraction
Launch the notebook Building-Footprint.ipynb to reproduce this chapter.
The first and second SpaceNet challenges aimed to extract building footprints from satellite images at various AOIs. The fourth SpaceNet challenge posed a similar task with more challenging off-nadir ( oblique-looking angles) imagery. We reproduce a winning algorithm and evaluate its performance with both RGB images and LiDAR data.
Training data
In the Las Vegas AOI, SpaceNet data is tiled to size 200m x 200m. We select 3,084 tiles in which both SpaceNet imagery and LiDAR data are available and merge them together. Unfortunately, the labels of test data for scoring in the SpaceNet challenges are not published, so we split the merged data into 70% and 30% for training and evaluation. Between LiDAR elevation and intensity, we choose elevation for building extractions. See the following code:
In the Las Vegas AOI, SpaceNet data is tiled to size 200m×200m. We select 3084 tiles where both SpaceNet imagery and LiDAR data are available and merge them together. Unfortunately, the labels of test data for scoring in the SpaceNet challenges are not published, so we split the merged data by 70%/30% for training and evaluation. Between LiDAR elevation and intensity, we choose elevation for building extractions.
# Create Pandas data frame, containing columns 'image' and 'label'.
total_df = pd.DataFrame({'image': img_path_list
'label': mask_path_list})
# Split this data frame to training data and blind test data.
split_mask = np.random.rand(len(total_df)) < 0.7
train_df = total_df[split_mask]
test_df = total_df[~split_mask]Model
We reproduce the winning algorithm from SpaceNet challenge 4 by XD_XD. The model has a U-net architecture with skip-connections between encoder and decoder, and a modified VGG16 as backbone encoder. The model takes three different types of input:
- Three-channel RGB image, same as the original contest
- One-channel LiDAR elevation image
- Four-channel RGB+LiDAR merged image
We train three models based on the three types of inputs described in this post and compare their performances.
The label for training is binary mask converted from polygon geojson by Solaris, an ML pipeline library developed by CosmiQ Works. We select a combined loss of binary cross-entropy and Jaccard loss with a weight factor alpha=0.8:
mathcal{L} =
alphamathcal{L}_mathrm{BCE} + (1 –
alphamathcal{L}_mathrm{Jaccard})
We train the models with batch size 20, Adam optimizer, and 10-4 learning rate for 100 epochs. The training takes approximately 100 minutes to finish on an ml.p3.8xlarge SageMaker notebook instance. See the following code:
# Load customized multi-channel input VGG16-Unet model.
from networks.vgg16_unet import get_modified_vgg16_unet
custom_model = get_modified_vgg16_unet(
in_channels=config['data_specs']['channels'])
custom_model_dict = {
'model_name': 'modified_vgg16_unet',
'arch': custom_model}
# Select config file and link training datasets.
config = sol.utils.config.parse('./configs/buildings/RGB+ELEV.yml')
config['training_data_csv'] = train_csv_path
# Create solaris trainer, and train with configuration.
trainer = sol.nets.train.Trainer(config, custom_model_dict=custom_model_dict)
trainer.train()The following images show examples of building extraction inputs and outputs. From left to right, the columns are RGB image, LiDAR elevation image, model prediction trained with RGB and LiDAR data, and ground truth building footprint mask.

Evaluation
Use the trained model to perform model inference on the test dataset (30% hold-out):
custom_model_dict = {
'model_name': 'modified_vgg16_unet',
'arch': custom_model,
'weight_path': config['training']['model_dest_path']}
config['train'] = False
# Create solaris inferer, and do inference on test data.
inferer = sol.nets.infer.Inferer(config, custom_model_dict=custom_model_dict)
inferer(test_df)After model inference, we evaluate the model performance using the same metric as in the original contest: an aggregated F-1 score with intersection of union (IoU) ≥ 0.5 criterion. There are two steps to compute this score. First, convert the building footprint binary masks to proposed polygons:
# Convert these probability maps to building polygons.
def pred_to_prop(pred_file, img_path):
pred_path = os.path.join(pred_dir, pred_file)
pred = skimage.io.imread(pred_path)[..., 0]
prop_file =
pred_file.replace('RGB+ELEV', 'geojson_buildings').replace('tif', 'geojson')
prop_path = os.path.join(prop_dir, prop_file)
prop = sol.vector.mask.mask_to_poly_geojson(
pred_arr=pred,
reference_im=img_path,
do_transform=True,
min_area=1e-10,
output_path=prop_path)Next, compare the proposed polygons against the ground truth polygons (SpaceNet building labels), and count the aggregated F-1 scores:
# Evaluate aggregated F-1 scores.
def compute_score(prop_path, bldg_path):
evaluator = sol.eval.base.Evaluator(bldg_path)
evaluator.load_proposal(prop_path, conf_field_list=[])
score = evaluator.eval_iou(miniou=0.5, calculate_class_scores=False)
# score_list.append(score[0]) # skip because single-class
return score[0] # single-classThe following table shows the F-1 scores from the three models trained with RGB images, LiDAR elevation images, and RGB+LiDAR merged images. Compared to using RGB only as in the original SpaceNet competition, the model trained using only LiDAR elevation images achieves a score only a few percent worse. When combining both RGB and LiDAR elevation in training, the model outperforms the RGB-only model. For reference, the F-1 scores of the top three teams from SpaceNet challenge 2 in this AOI are 0.885, 0.829, and 0.787 (we don’t compare them directly because they use a different test set for scoring).
| Training data type | Aggregated F-1 scores |
| RGB images | 0.8268 |
| LiDAR elevation | 0.80676 |
| RGB+LiDAR merged | 0.85312 |
Road extraction
To reproduce this section, launch the notebook Road-Network.ipynb.
The third SpaceNet challenge aimed to extract road networks from satellite images. The fifth SpaceNet challenge added predicting road speed along with the road network extraction in order to minimize travel time and plan optimal routing. Similar to building extraction, we reproduce a top winning algorithm, train different models with either RGB images, LiDAR attributes, or both of them, and evaluate their performance.
Training data
The road network extraction uses larger tiles with size 400m x 400m. We generate 918 merged tiles, and split by 70%/30% for training and evaluation. In this case, we select reflectivity intensity for road extraction because road surfaces often consist of materials that have distinctive reflectivity among backgrounds, such as a paved surface, dirt road, or asphalt.
Model
We reproduce the CRESI algorithm for road networks extraction. It also has a U-net architecture but uses ResNet as the backbone encoder. Again, we train the model with three different types of input:
- Three-channel RGB image
- One-channel LiDAR intensity image
- Four-channel RGB+LiDAR merged image
To extract road location and speed together, binary road mask doesn’t provide enough information for training. As mentioned in the CRESI paper, we can convert the speed metadata to either continuous mask (0–1 values) or multi-class binary mask. Because their test results show that multi-class binary mask performs better, we use the latter conversion scheme. The following images break down the eight-class road masks. The first seven binary masks represent road corresponds to seven bins of speed within 0–65 mph. The eighth mask (bottom right) represents the aggregation of all previous masks.

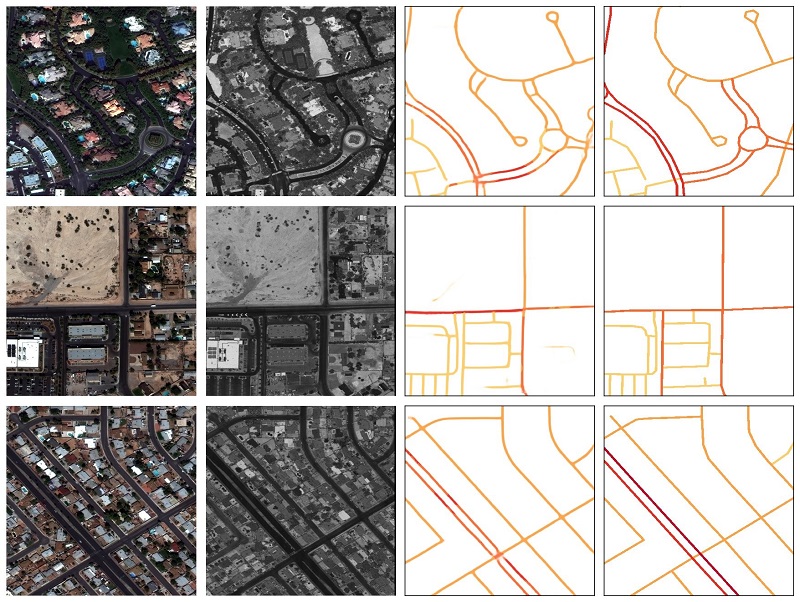
The following images show the visualization of multi-class road masks. The left is the RGB image tile. The right is the road mask with color coding in which the yellow-to-red colormap represents speed values from low to high speed (0–65 mph).

We train the model with the same setup as in the building extraction. The following images show examples of road extraction inputs and outputs. From left to right, the columns are RGB image, LiDAR reflectivity intensity image, model prediction trained with RGB and LiDAR data, and ground truth road mask.
Evaluation
We implement the average path length similarity (APLS) score to evaluate the road extraction performance. This metric is used in SpaceNet road challenges because APLS considers both logical topology (connections within road network) and physical topology (location of the road edges and nodes). The APLS can be weighted by either length or travel time; a higher score means better performance. See the following code:
# Skeletonize the prediction mask into non-geo road network graph.
!python ./libs/apls/skeletonize.py --results_dir={results_dir}
# Match geospatial info and create geo-projected graph.
!python ./libs/apls/wkt_to_G.py --imgs_dir={img_dir} --results_dir={results_dir}
# Infer road speed on each graph edge based on speed bins.
!python ./libs/apls/infer_speed.py --results_dir={results_dir}
--speed_conversion_csv_file='./data/roads/speed_conversion_binned7.csv'
# Compute length-based APLS score.
!python ./libs/apls/apls.py --output_dir={results_dir}
--truth_dir={os.path.join(data_dir, 'geojson_roads_speed')}
--im_dir={img_dir}
--prop_dir={os.path.join(results_dir, 'graph_speed_gpickle')}
--weight='length'
# Compute time-based APLS score.
!python ./libs/apls/apls.py --output_dir={results_dir}
--truth_dir={os.path.join(data_dir, 'geojson_roads_speed')}
--im_dir={img_dir}
--prop_dir={os.path.join(results_dir, 'graph_speed_gpickle')}
--weight='travel_time_s'We convert multi-class road mask predictions to skeleton and speed-weighted graph and compute APLS scores. The following table shows the APLS scores of the three models. Similar to the building extraction results, the LiDAR-only result achieves scores close to the RGB-only result, whereas RGB+LiDAR gives the best performance.
| Training data type | APLSlength | APLStime |
| RGB images | 0.59624 | 0.54298 |
| LiDAR intensity | 0.57811 | 0.52697 |
| RGB+LiDAR merged | 0.63651 | 0.58518 |
Conclusion
We demonstrate how to extract building extract buildings and roads from two large-scale geospatial datasets hosted on the Registry of Open Data on AWS using a SageMaker notebook instance. The SageMaker notebook instance contains everything needed to run or recreate an ML workflow. It’s easy to use and customize to best fit different scenarios.
By using the LiDAR dataset from the Registry of Open Data on AWS and reproducing winning algorithms from SpaceNet building and road challenges, we show that you can use LiDAR data to perform the same task with similar accuracy, and even outperform the RGB models when combined.
With the full code and notebooks shared on GitHub and the necessary data hosted in the public S3 bucket, you can reproduce the map feature extraction tasks, apply the models to any other area of interest, and innovate with new ideas to improve model performance. For the complete code and notebooks of this tutorial, see our GitHub repo.
About the Authors
 Yunzhi Shi is a data scientist at the Amazon ML Solutions Lab where he helps AWS customers address business problems with AI and cloud capabilities. Recently, he has been building computer vision, search, and forecast solutions for various customers.
Yunzhi Shi is a data scientist at the Amazon ML Solutions Lab where he helps AWS customers address business problems with AI and cloud capabilities. Recently, he has been building computer vision, search, and forecast solutions for various customers.

Xin Chen is a senior manager at Amazon ML Solutions Lab, where he leads the Automotive Vertical and helps AWS customers across different industries identify and build machine learning solutions to address their organization’s highest return-on-investment machine learning opportunities. Xin obtained his Ph.D. in Computer Science and Engineering from the University of Notre Dame.

Tianyu Zhang is a data scientist at the Amazon ML Solutions Lab. He helps AWS customers solve business problems by applying ML and AI techniques. Most recently, he has built NLP model and predictive model for procurement and sports.





 Talia Chopra is a Technical Writer in AWS specializing in machine learning and artificial intelligence. She works with multiple teams in AWS to create technical documentation and tutorials for customers using Amazon SageMaker, MxNet, and AutoGluon.
Talia Chopra is a Technical Writer in AWS specializing in machine learning and artificial intelligence. She works with multiple teams in AWS to create technical documentation and tutorials for customers using Amazon SageMaker, MxNet, and AutoGluon. Phil Cunliffe is an engineer turned Software Development Manager for Amazon Human in the Loop services. He is a JavaScript fanboy with an obsession for creating great user experiences.
Phil Cunliffe is an engineer turned Software Development Manager for Amazon Human in the Loop services. He is a JavaScript fanboy with an obsession for creating great user experiences.

 Azim Siddique serves as Technical Advisor and CoE Architect at Foxconn. He provides architectural direction for the Digital Transformation program, conducts PoCs with emerging technologies, and guides engineering teams to deliver business value by leveraging digital technologies at scale.
Azim Siddique serves as Technical Advisor and CoE Architect at Foxconn. He provides architectural direction for the Digital Transformation program, conducts PoCs with emerging technologies, and guides engineering teams to deliver business value by leveraging digital technologies at scale. Felice Chuang is a Data Architect at Foxconn. She uses her diverse skillset to implement end-to-end architecture and design for big data, data governance, and business intelligence applications. She supports analytic workloads and conducts PoCs for Digital Transformation programs.
Felice Chuang is a Data Architect at Foxconn. She uses her diverse skillset to implement end-to-end architecture and design for big data, data governance, and business intelligence applications. She supports analytic workloads and conducts PoCs for Digital Transformation programs. Yash Shah is a data scientist in the Amazon ML Solutions Lab, where he works on a range of machine learning use cases from healthcare to manufacturing and retail. He has a formal background in Human Factors and Statistics, and was previously part of the Amazon SCOT team designing products to guide 3P sellers with efficient inventory management.
Yash Shah is a data scientist in the Amazon ML Solutions Lab, where he works on a range of machine learning use cases from healthcare to manufacturing and retail. He has a formal background in Human Factors and Statistics, and was previously part of the Amazon SCOT team designing products to guide 3P sellers with efficient inventory management. Dan Volk is a Data Scientist at Amazon ML Solutions Lab, where he helps AWS customers across various industries accelerate their AI and cloud adoption. Dan has worked in several fields including manufacturing, aerospace, and sports and holds a Masters in Data Science from UC Berkeley.
Dan Volk is a Data Scientist at Amazon ML Solutions Lab, where he helps AWS customers across various industries accelerate their AI and cloud adoption. Dan has worked in several fields including manufacturing, aerospace, and sports and holds a Masters in Data Science from UC Berkeley.

