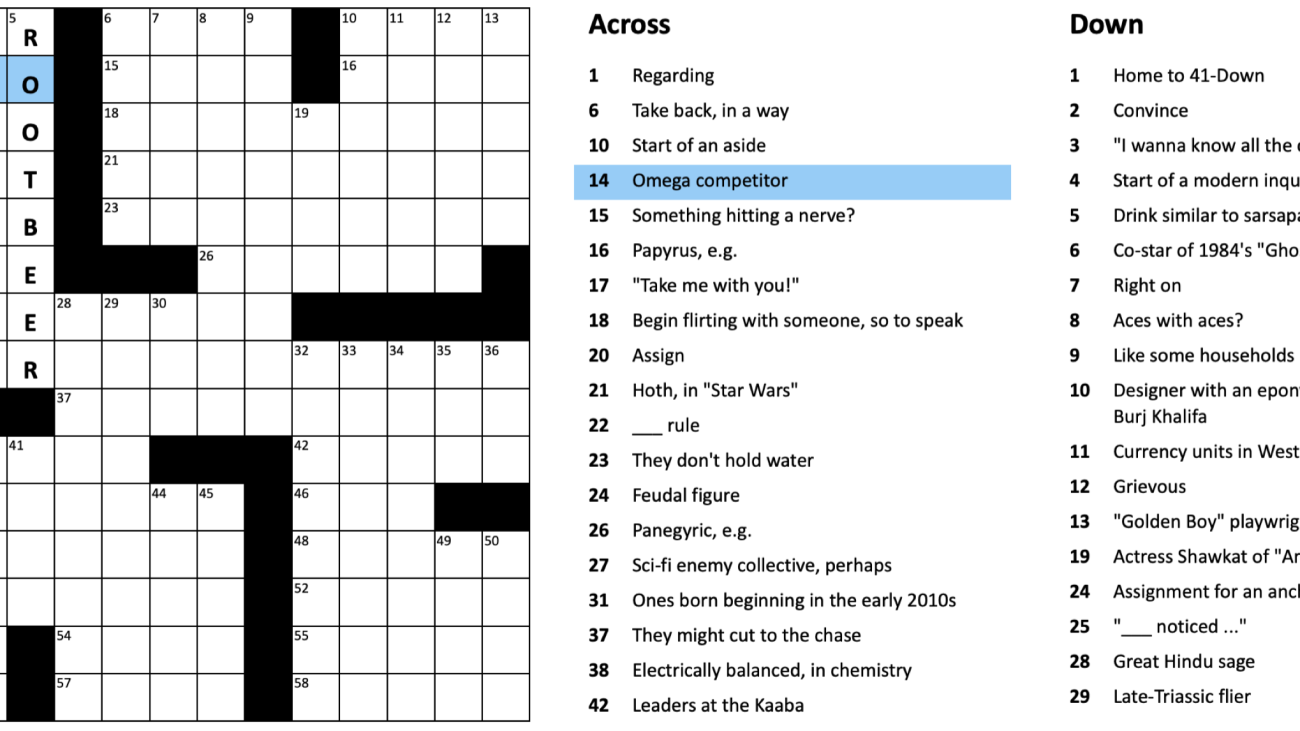
We recently built the Berkeley Crossword Solver (BCS), the first computer program to beat every human competitor in the world’s top crossword tournament. The BCS combines neural question answering and probabilistic inference to achieve near-perfect performance on most American-style crossword puzzles, like the one shown below:
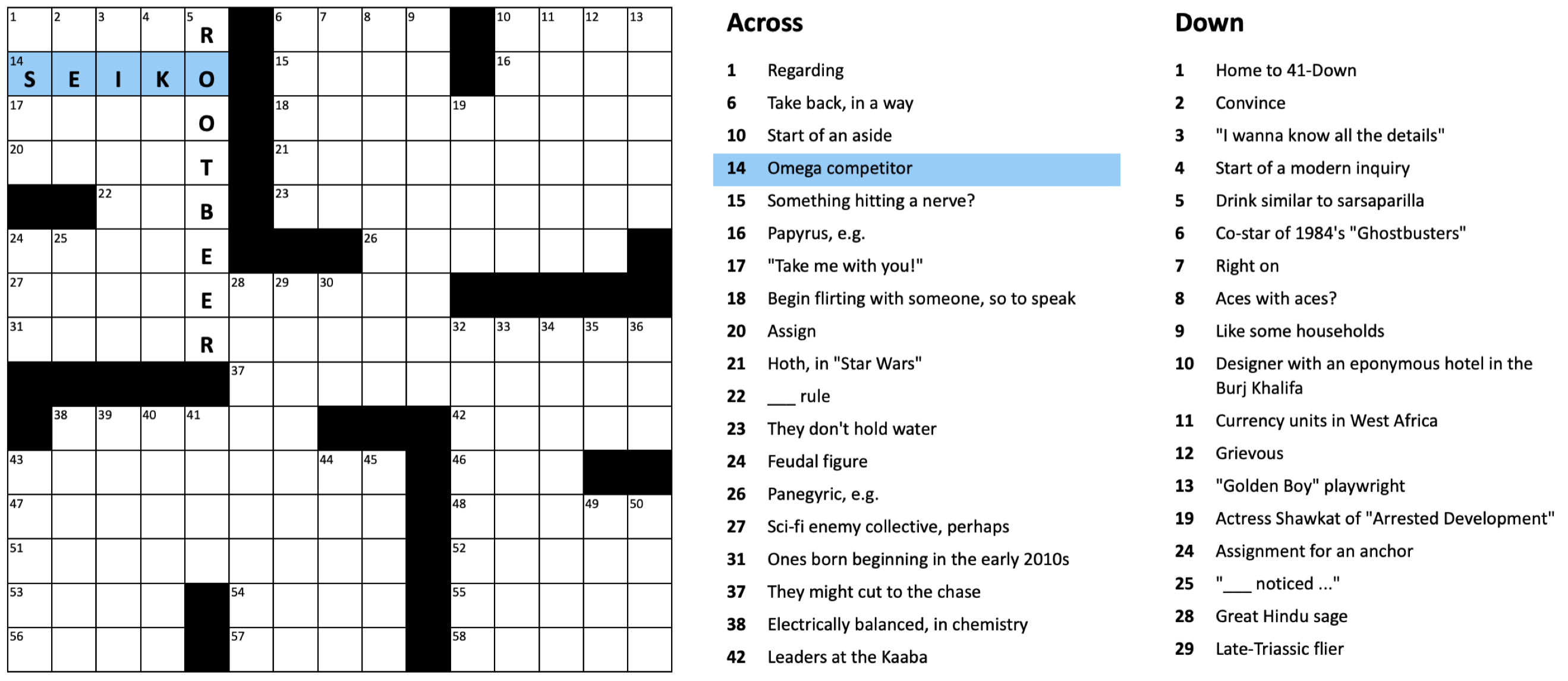
Figure 1: Example American-style crossword puzzle
Crosswords are challenging for humans and computers alike. Many clues are vague or underspecified and can’t be answered until crossing constraints are taken into account. While some clues are similar to factoid question answering, others require relational reasoning or understanding difficult wordplay.