The Thirty-fifth Conference on Neural Information Processing Systems (NeurIPS) 2021 is being hosted virtually from Dec 6th – 14th. We’re excited to share all the work from SAIL that’s being presented at the main conference, at the Datasets and Benchmarks track and the various workshops, and you’ll find links to papers, videos and blogs below.
Some of the members in our SAIL community also serve as co-organizers of several exciting workshops that will take place on Dec 13-14, so we hope you will check them out!
Feel free to reach out to the contact authors and the workshop organizers directly to learn more about the work that’s happening at Stanford!
Main Conference
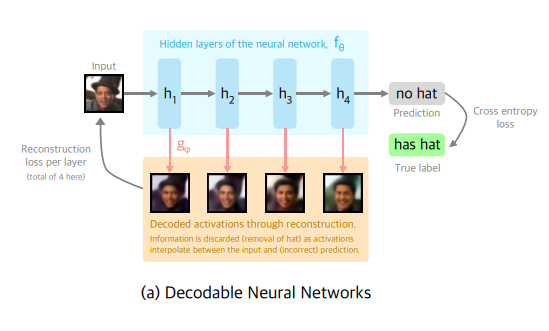
Authors: Mike Wu, Noah Goodman, Stefano Ermon
Contact: wumike@stanford.edu
Links: Paper
Keywords: generative models, compositionality, decoder
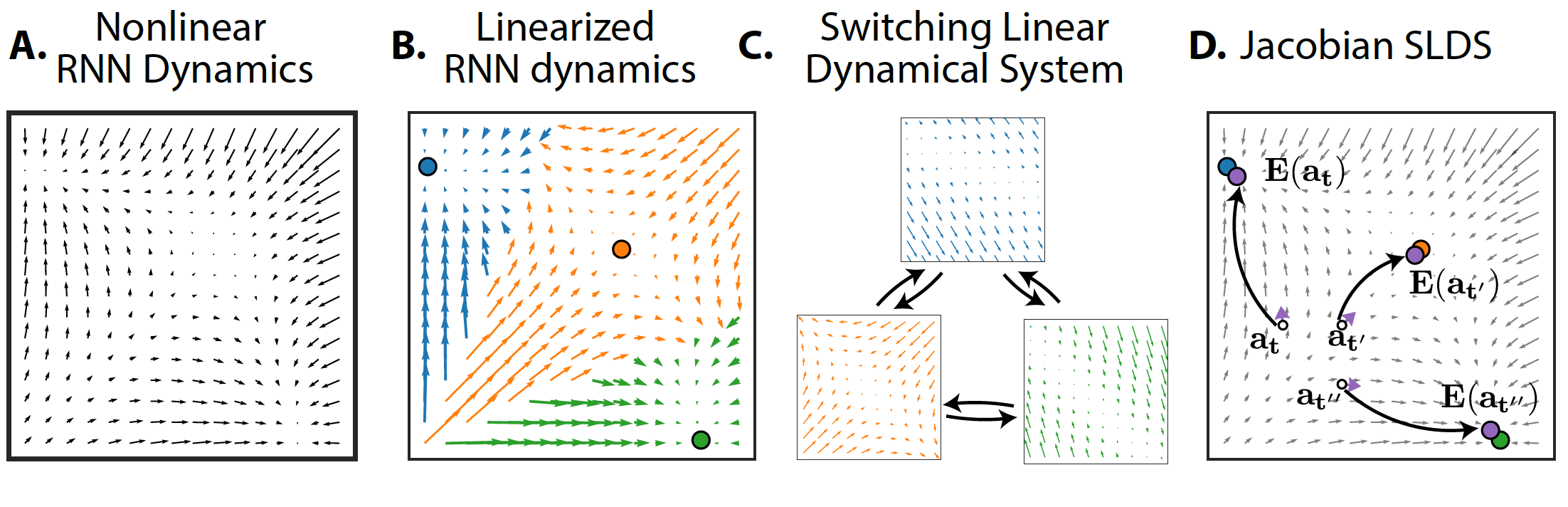
Authors: Jimmy T.H. Smith, Scott W. Linderman, David Sussillo
Contact: jsmith14@stanford.edu
Links: Paper | Website
Keywords: recurrent neural networks, switching linear dynamical systems, interpretability, fixed points
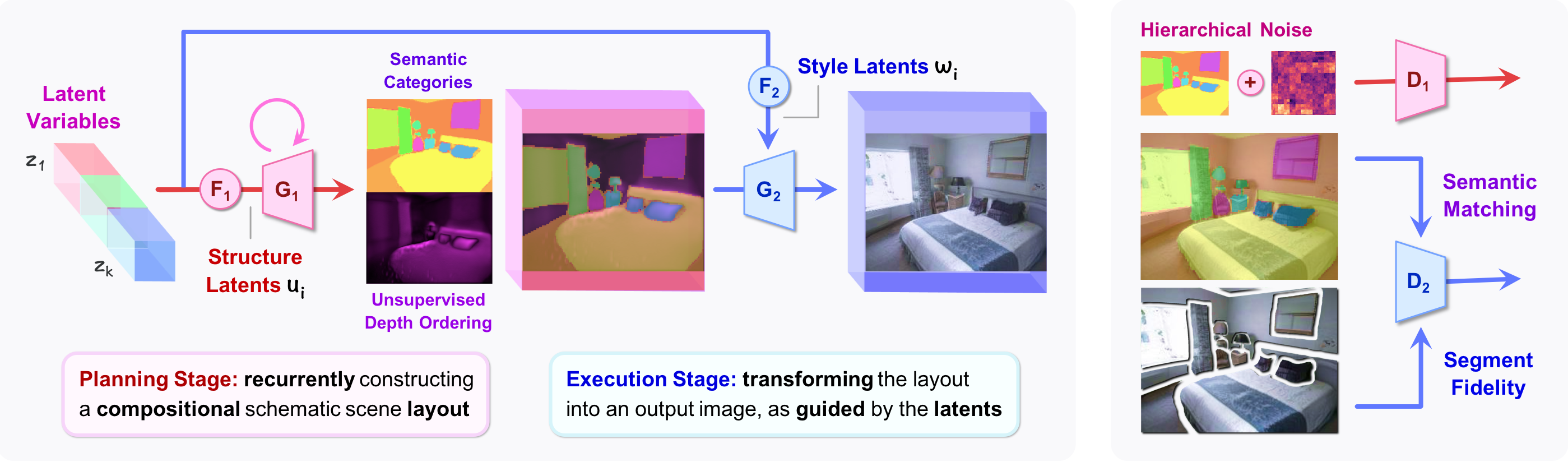
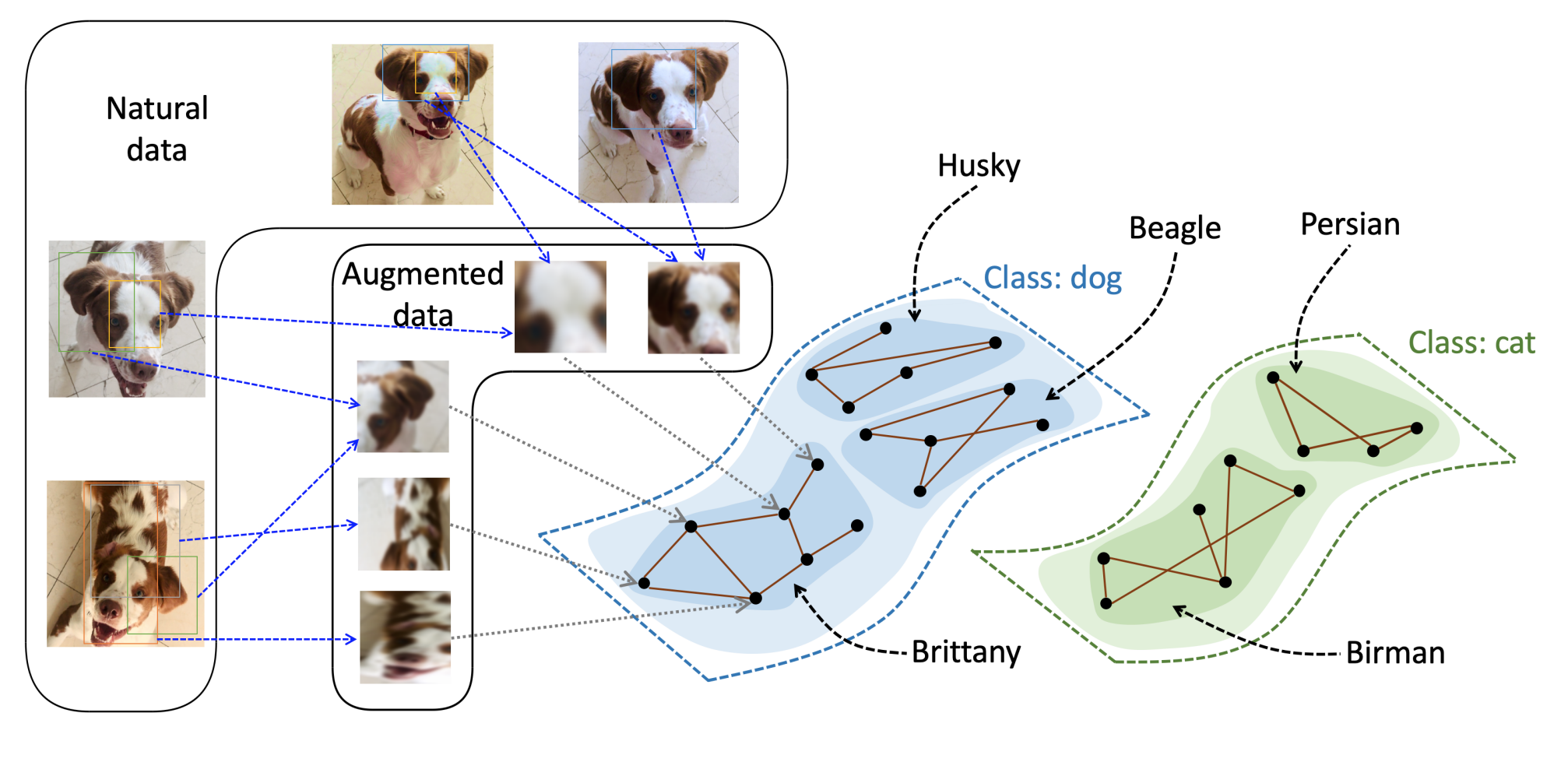
Authors: Drew A. Hudson, C. Lawrence Zitnick
Contact: dorarad@cs.stanford.edu
Links: Paper | Github
Keywords: GANs, transformers, compositionality, scene synthesis
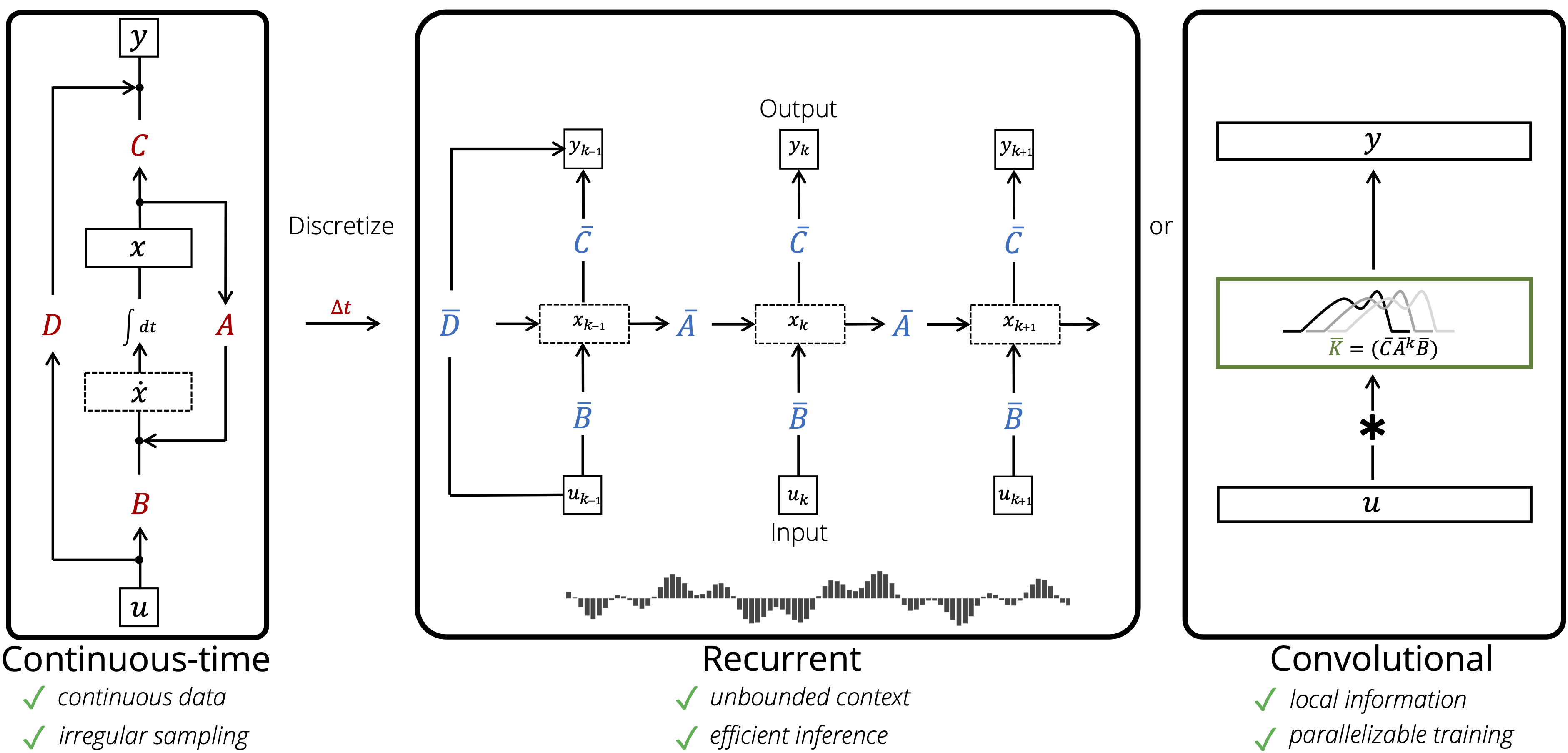
Authors: Albert Gu, Isys Johnson, Karan Goel, Khaled Saab, Tri Dao, Atri Rudra, Chris Ré
Contact: albertgu@stanford.edu
Links: Paper
Keywords: recurrent neural networks, rnn, continuous models, state space, long range dependencies, sequence modeling
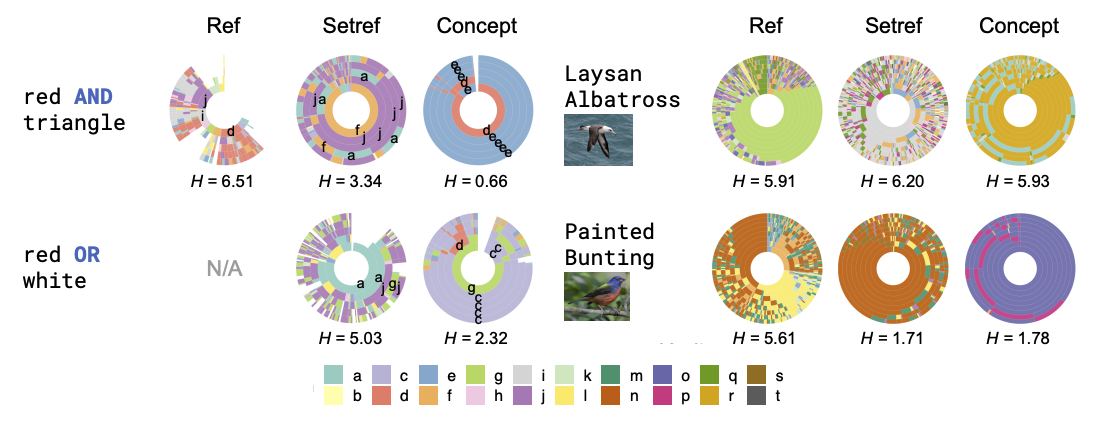
Authors: Jesse Mu, Noah Goodman
Contact: muj@stanford.edu
Links: Paper | Video
Keywords: emergent communication, multi-agent communication, language grounding, compositionality
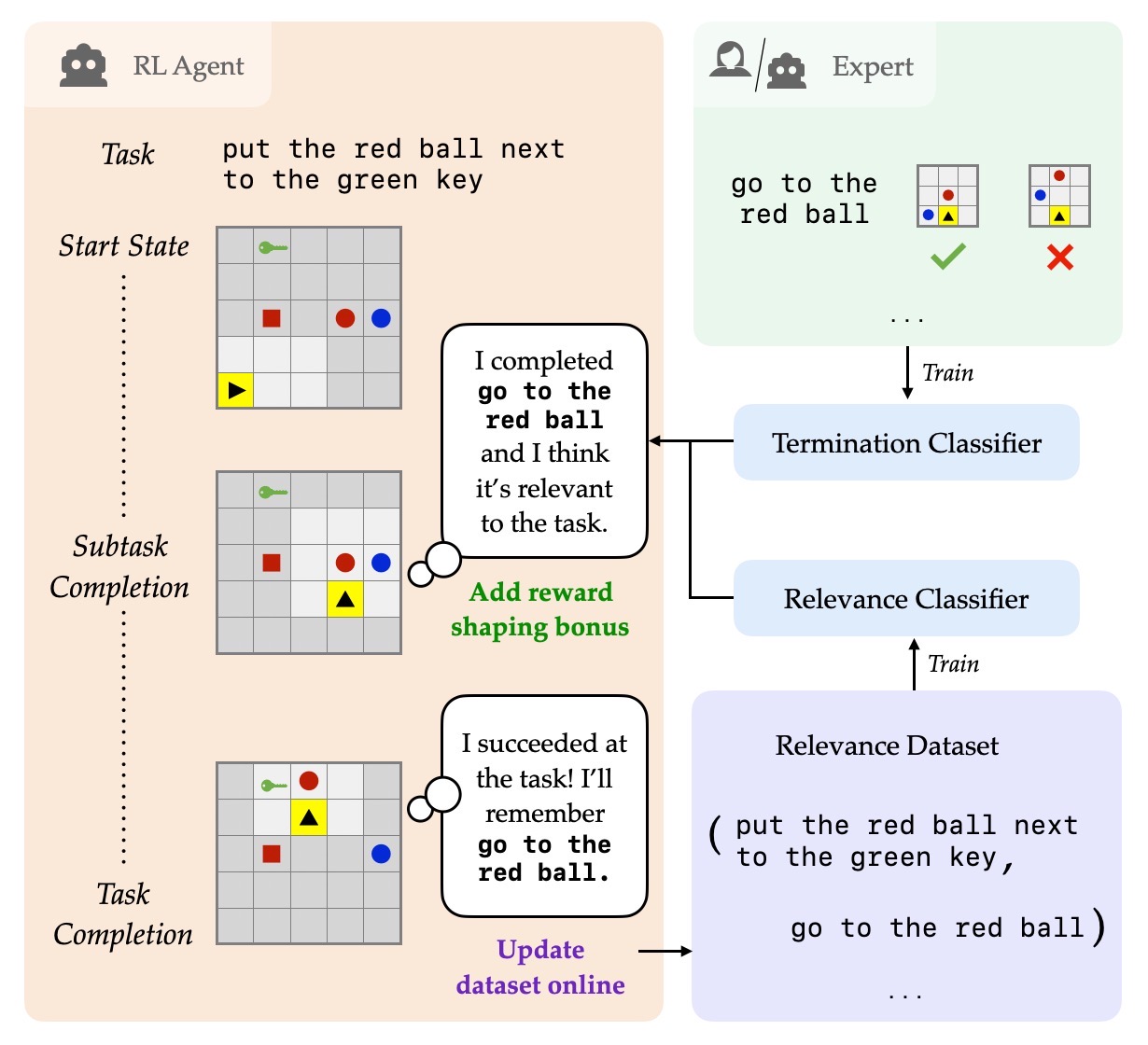
Authors: Suvir Mirchandani, Siddharth Karamcheti, Dorsa Sadigh
Contact: suvir@cs.stanford.edu
Links: Paper | Video
Keywords: instruction following, reward shaping, reinforcement learning
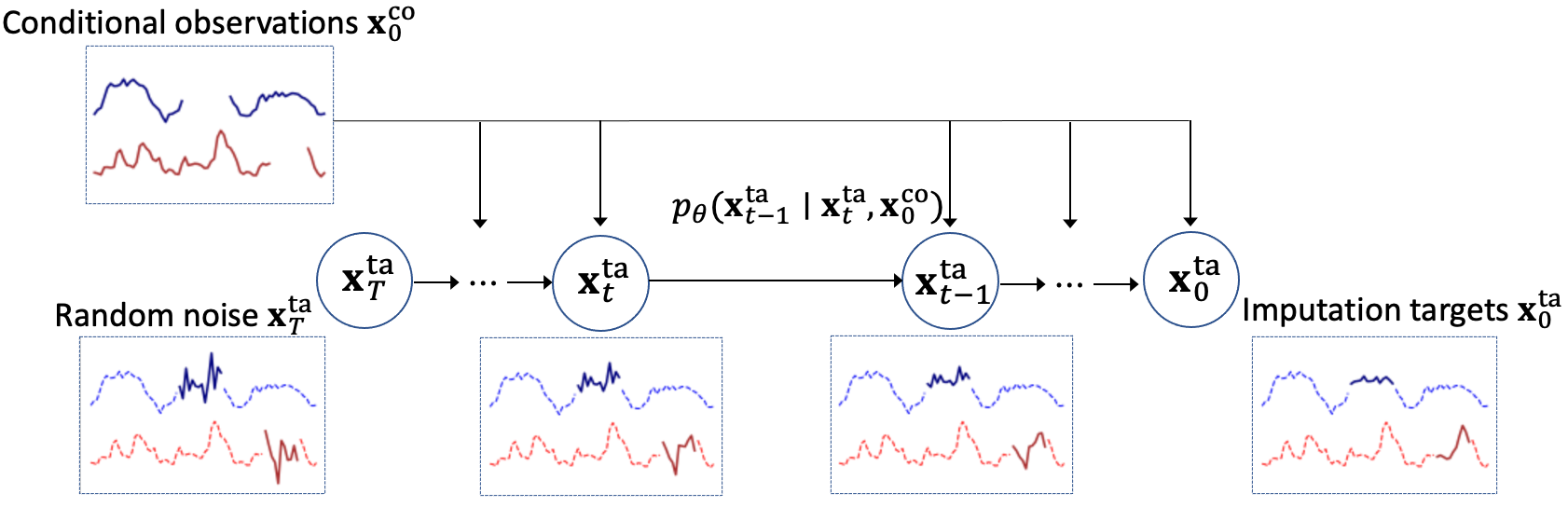
Authors: Yusuke Tashiro, Jiaming Song, Yang Song, Stefano Ermon
Contact: ytashiro@stanford.edu
Links: Paper | Website
Keywords: score-based generative modeling, time series imputation
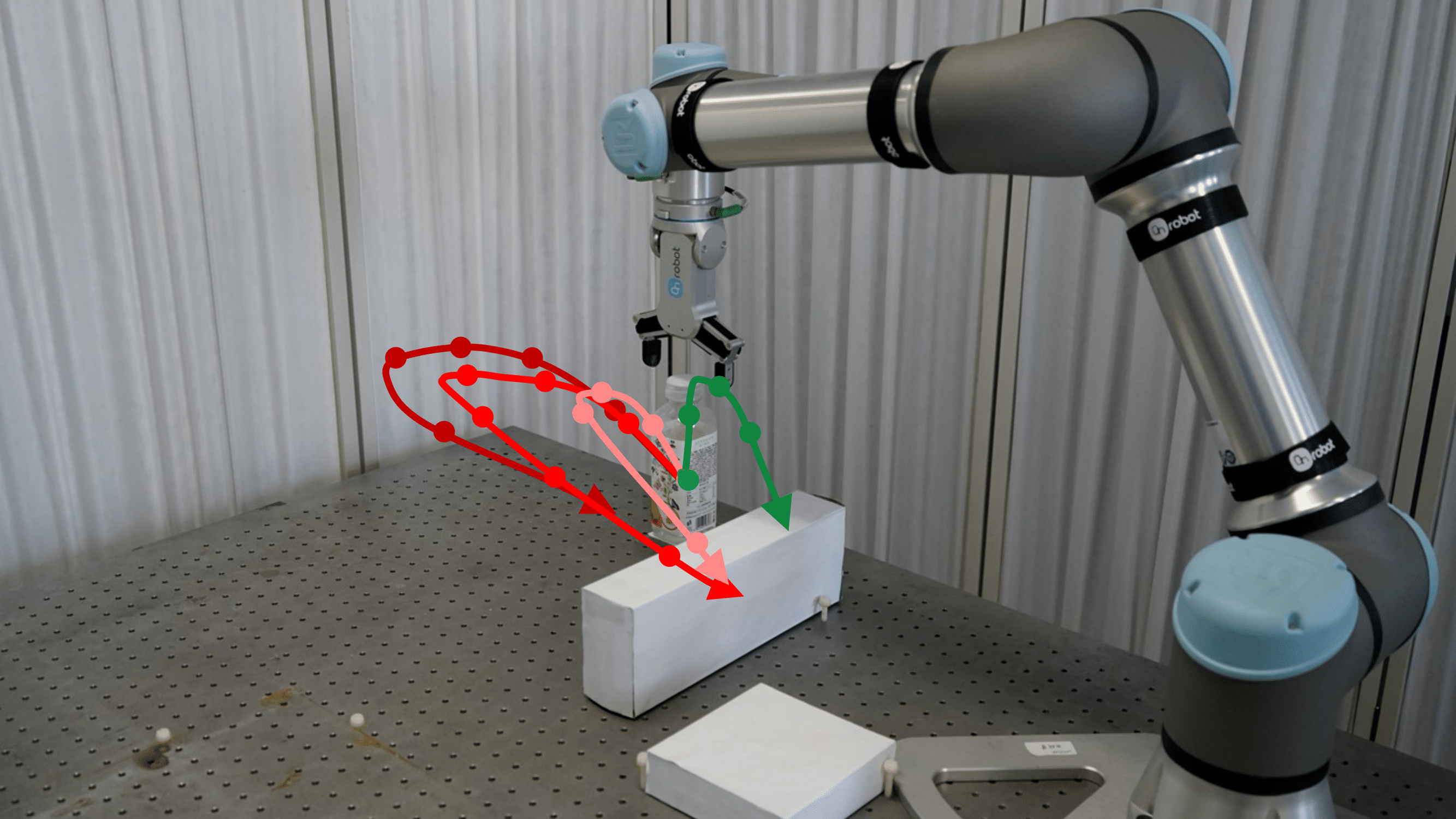
Authors: Songyuan Zhang, Zhangjie Cao, Dorsa Sadigh, Yanan Sui
Contact: szhang21@mit.edu
Links: Paper | Video | Website
Keywords: imitation learning, learning from demonstration, learning from suboptimal demonstrations
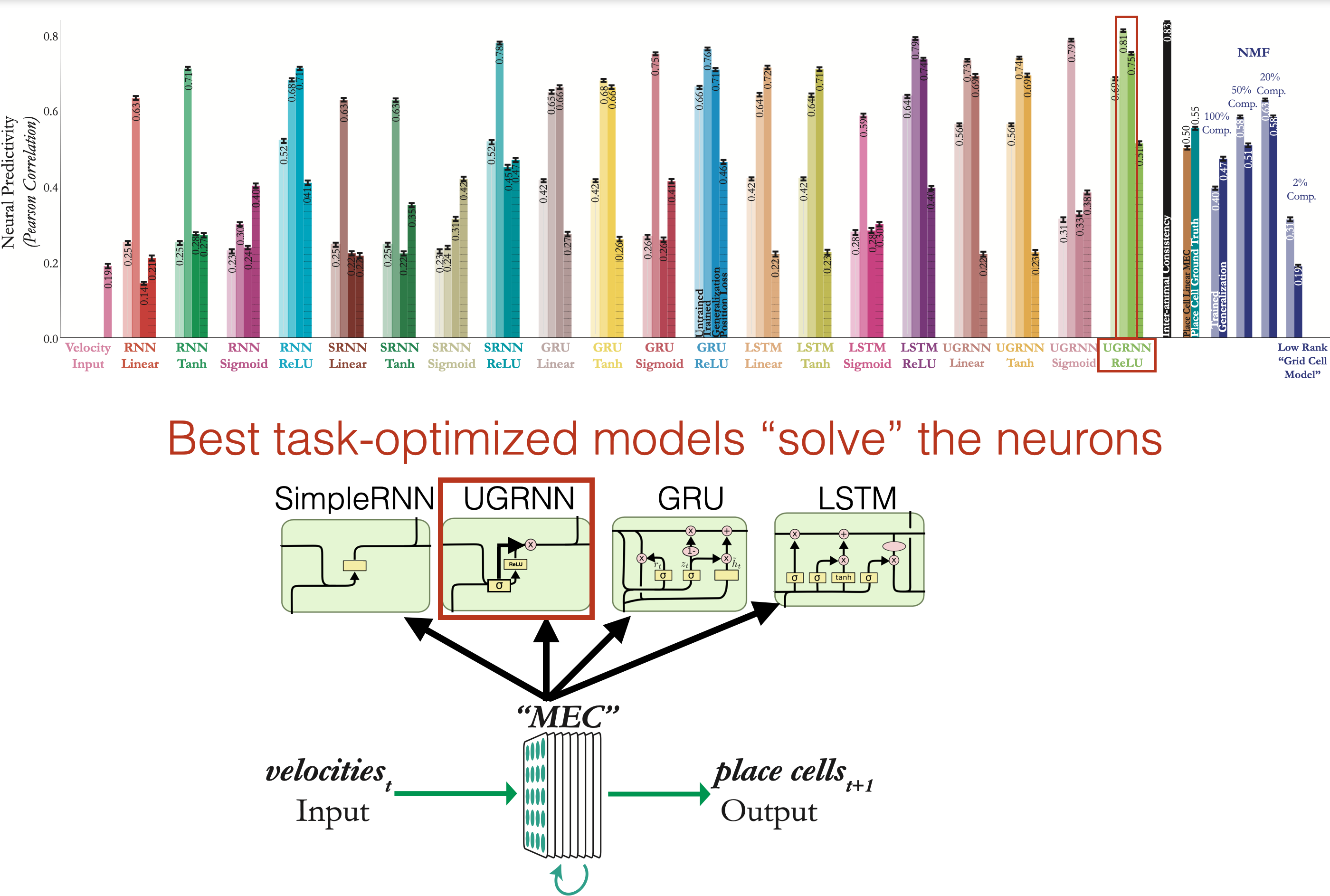
Authors: Aran Nayebi, Alexander Attinger, Malcolm G. Campbell, Kiah Hardcastle, Isabel I.C. Low, Caitlin S. Mallory, Gabriel C. Mel, Ben Sorscher, Alex H. Williams, Surya Ganguli, Lisa M. Giocomo, Daniel L.K. Yamins
Contact: anayebi@stanford.edu
Award nominations: Spotlight Presentation
Links: Paper | Website
Keywords: neural coding, medial entorhinal cortex, grid cells, biologically-inspired navigation, path integration, recurrent neural networks
On the theory of reinforcement learning with once-per-episode feedback
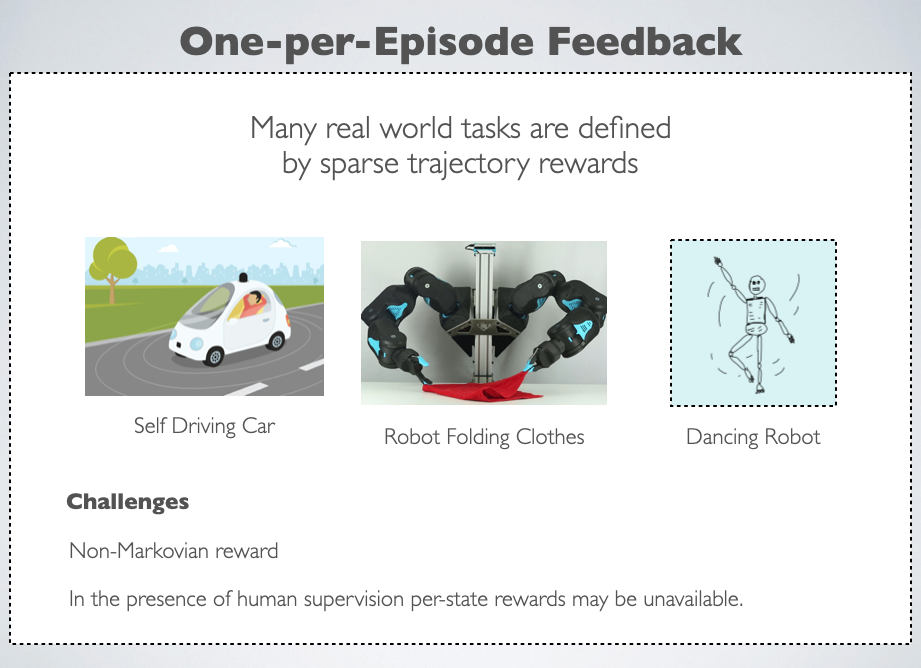
Authors: Niladri Chatterji, Aldo Pacchiano, Peter Bartlett, Michael Jordan
Contact: niladri@cs.stanford.edu
Keywords: theoretical reinforcement learning, binary rewards, non-markovian rewards
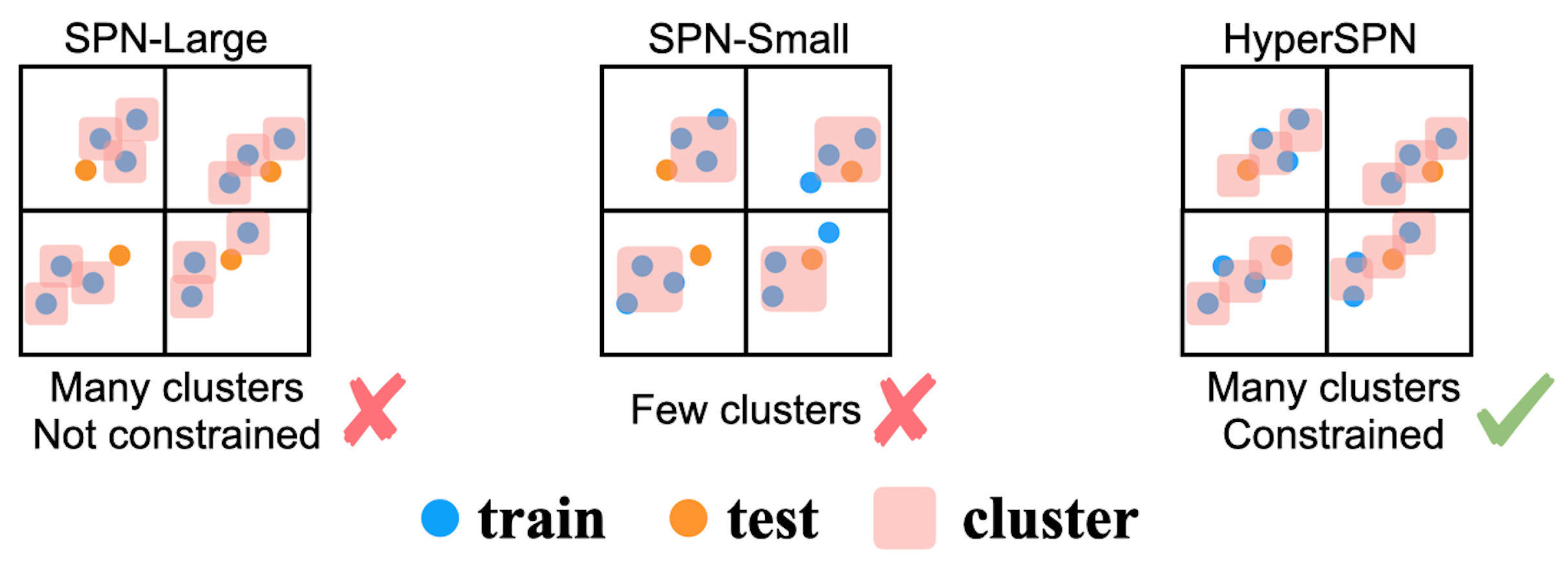
Authors: Andy Shih, Dorsa Sadigh, Stefano Ermon
Contact: andyshih@stanford.edu
Links: Paper | Video | Website
Keywords: generative models, tractable probabilistic models, sum product networks, probabilistic circuits
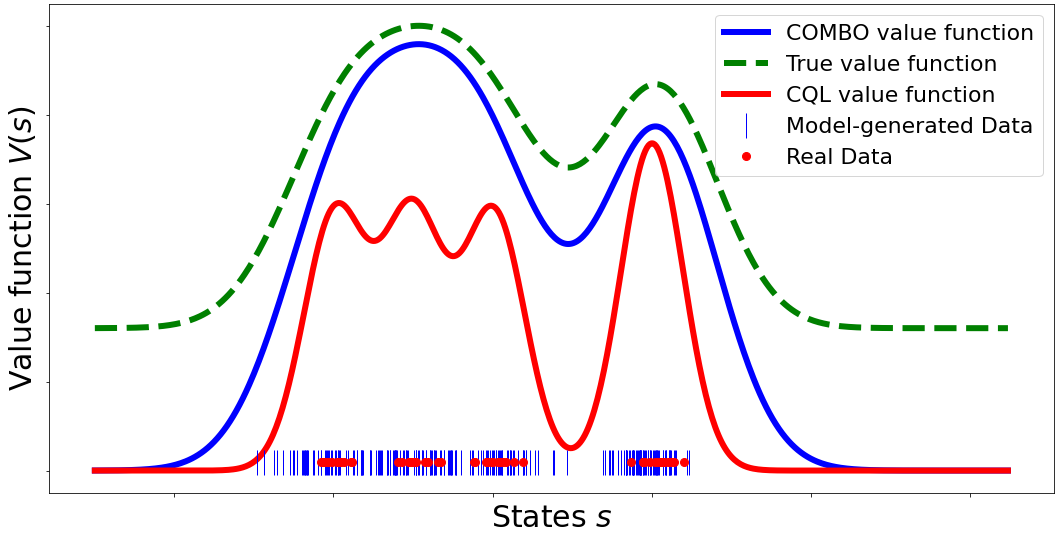
Authors: Tianhe Yu*, Aviral Kumar*, Rafael Rafailov, Aravind Rajeswaran, Sergey Levine, Chelsea Finn
Contact: tianheyu@cs.stanford.edu
Links: Paper
Keywords: offline reinforcement learning, model-based reinforcement learning, deep reinforcement learning
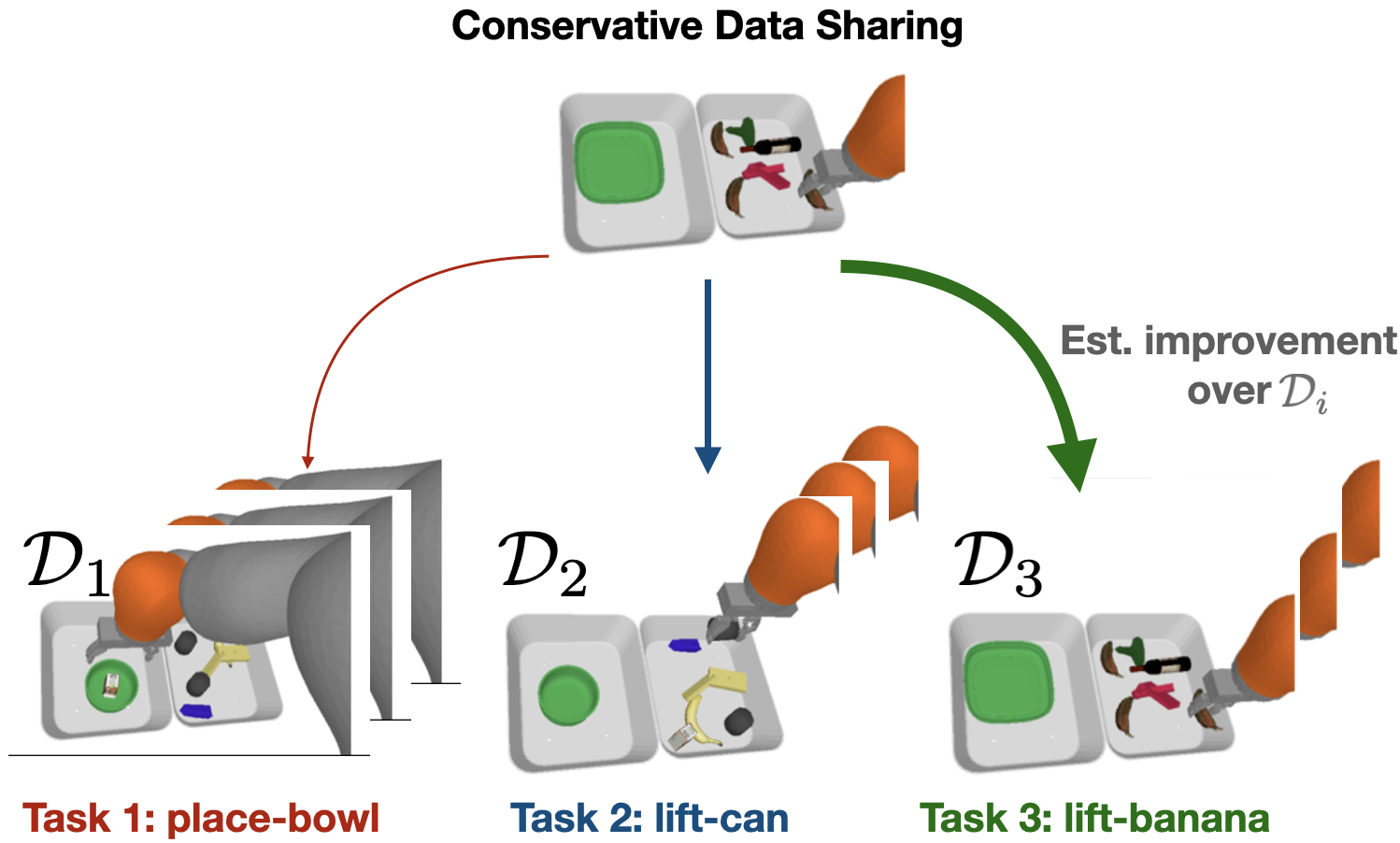
Authors: Tianhe Yu*, Aviral Kumar*, Yevgen Chebotar, Karol Hausman, Sergey Levine, Chelsea Finn
Contact: tianheyu@cs.stanford.edu
Links: Paper
Keywords: offline reinforcement learning, multi-task reinforcement learning, deep reinforcement learning
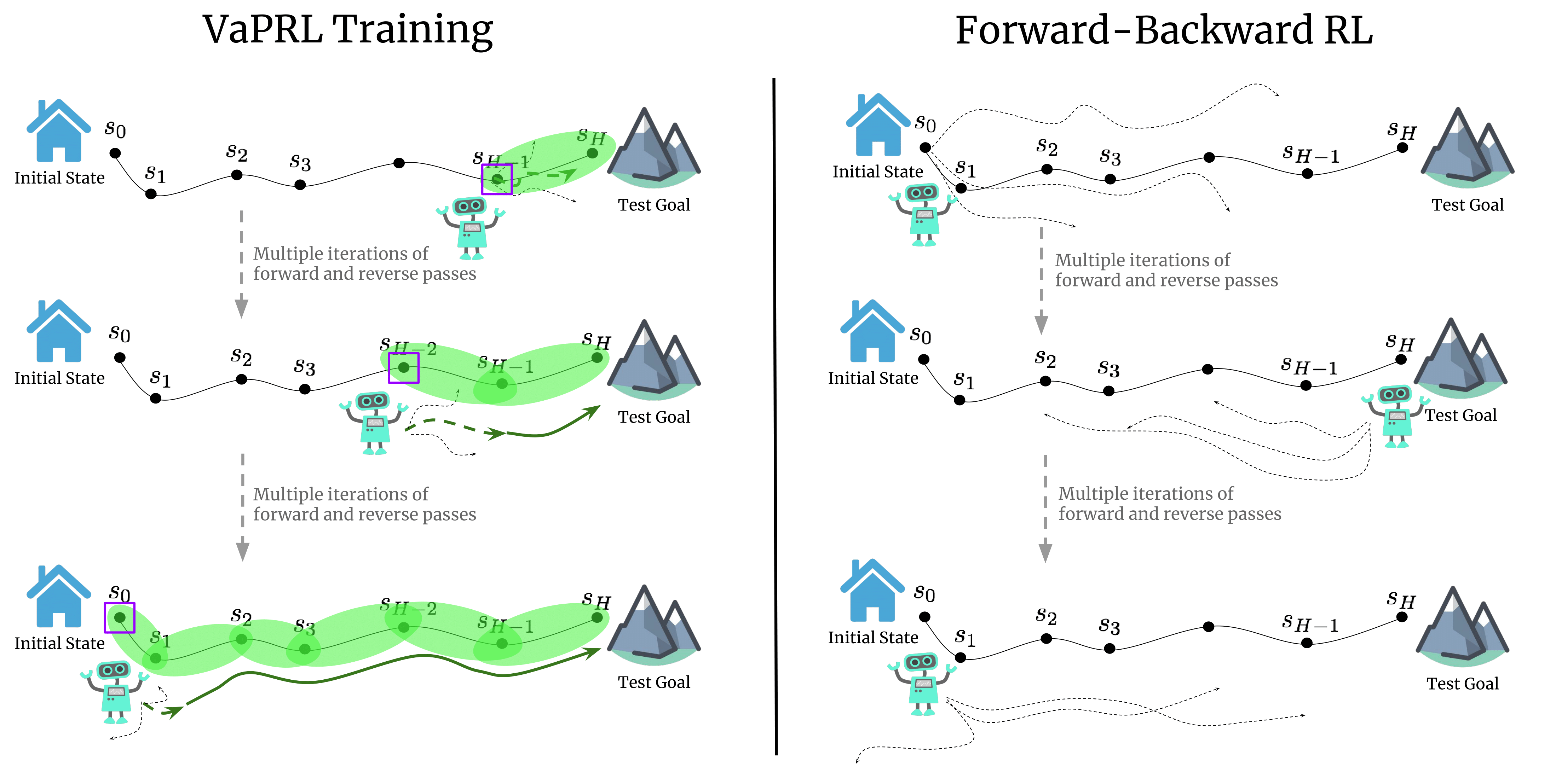
Authors: Archit Sharma, Abhishek Gupta, Sergey Levine, Karol Hausman, Chelsea Finn
Contact: architsh@stanford.edu
Links: Paper | Website
Keywords: reinforcement learning, curriculum, autonomous learning, reset-free reinforcement learning
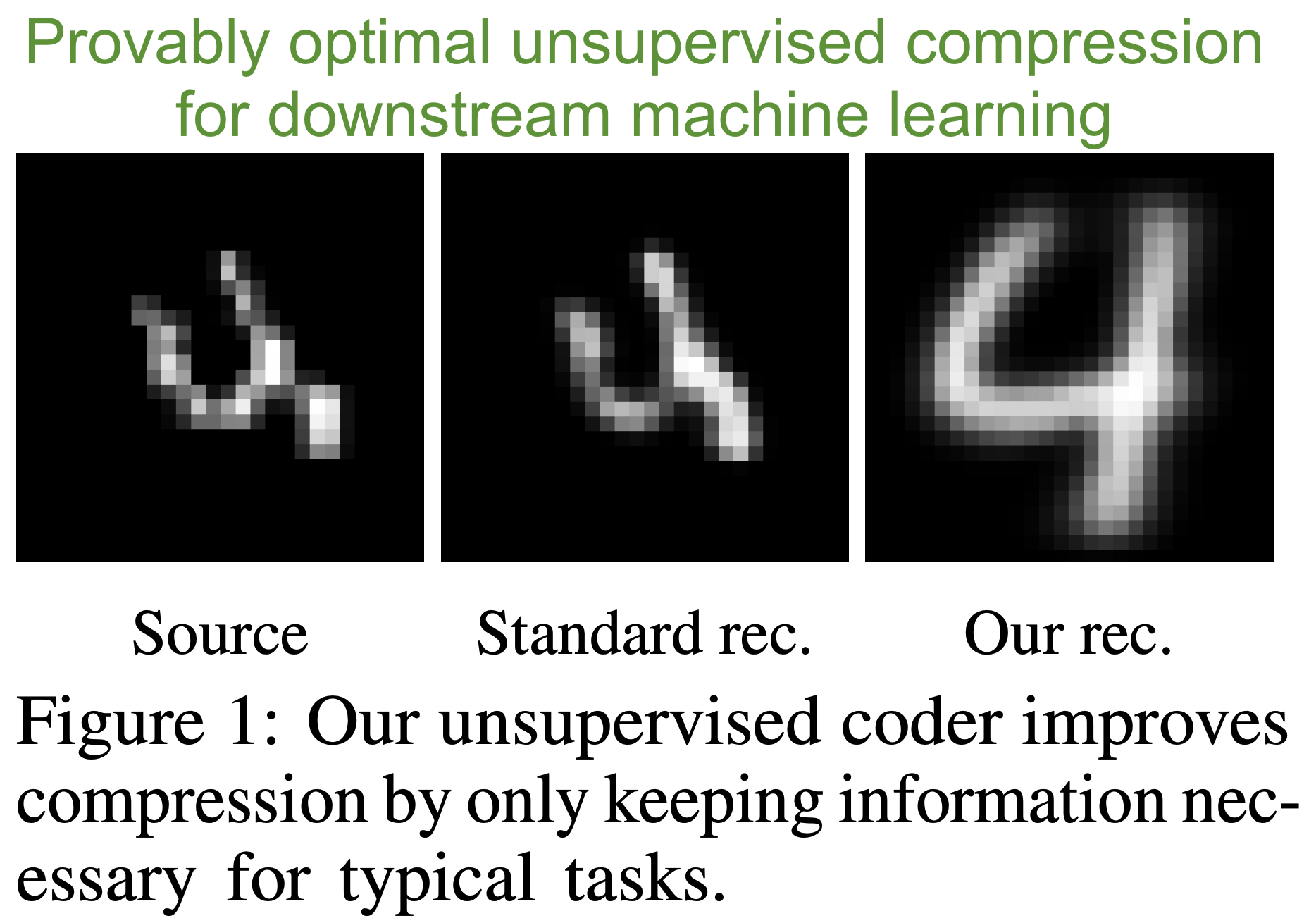
Authors: Yann Dubois, Benjamin Bloem-Reddy, Karen Ullrich Chris J. Maddison
Contact: yanndubs@stanford.edu
Award nominations: Spotlight Presentation
Links: Paper | Video | Website
Keywords: compression, invariances, information theory, machine learning, self-supervised learning
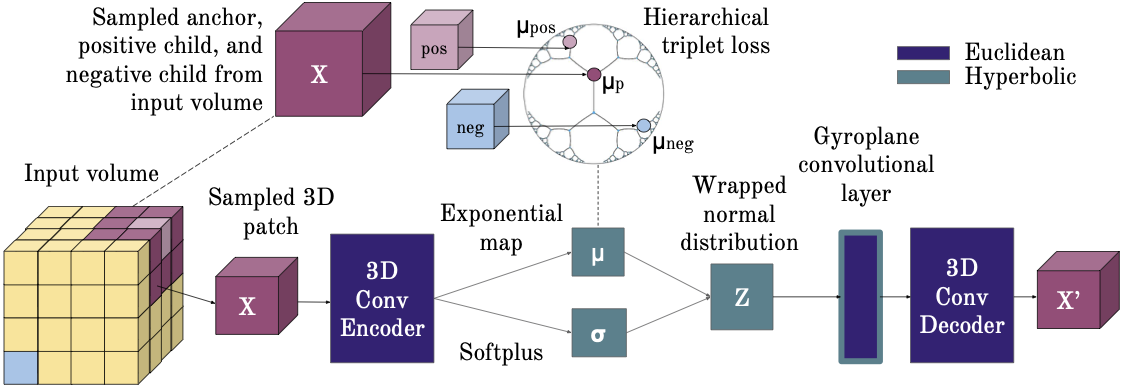
Authors: Joy Hsu, Jeffrey Gu, Gong-Her Wu, Wah Chiu, Serena Yeung
Contact: joycj@stanford.edu
Links: Paper
Keywords: hyperbolic representations, hierarchical structure, biomedical
Estimating High Order Gradients of the Data Distribution by Denoising
Authors: Chenlin Meng, Yang Song, Wenzhe Li, Stefano Ermon
Contact: chenlin@stanford.edu
Keywords: score matching, langevin dynamics, denoising, generative modeling
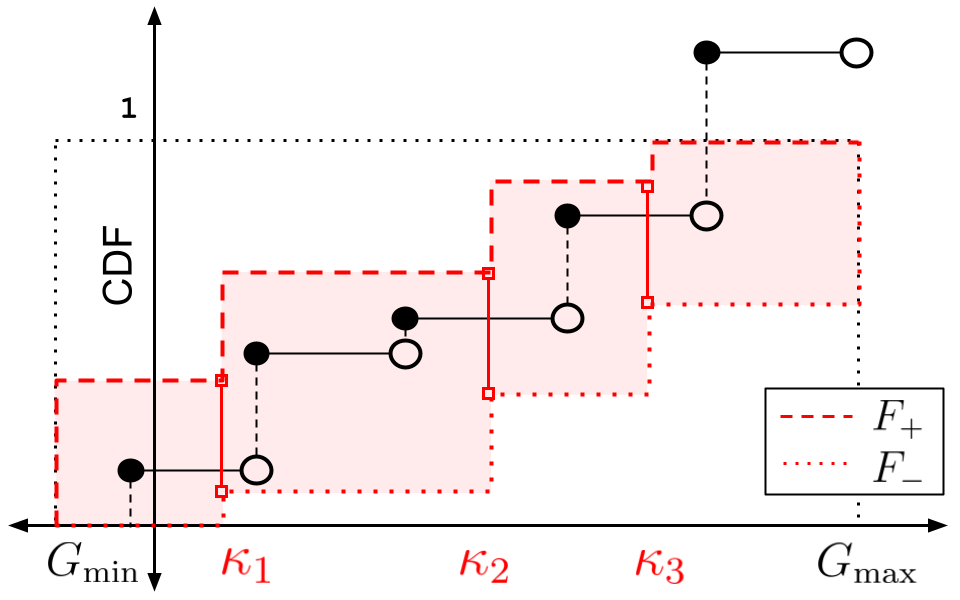
Authors: Yash Chandak, Scott Niekum, Bruno Castro da Silva, Erik Learned-Miller, Emma Brunskill, Philip Thomas
Contact: ychandak@cs.umass.edu
Links: Paper | Website
Keywords: metrics, risk, distribution, cdf, off-policy evaluation, ope, reinforcement learning, counterfactuals, high-confidence bounds, confidence intervals
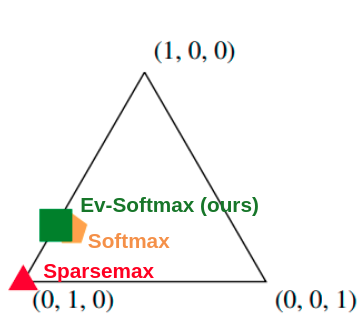
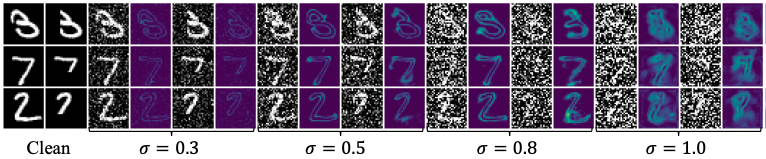
Authors: Phil Chen, Masha Itkina, Ransalu Senanayake, Mykel J. Kochenderfer
Contact: philhc@stanford.edu
Links: Paper
Keywords: deep learning or neural networks, sparsity and feature selection, variational inference, (application) natural language and text processing
Authors: Jeff Z. HaoChen, Colin Wei, Adrien Gaidon, Tengyu Ma
Contact: jhaochen@stanford.edu
Links: Paper
Keywords: deep learning theory, unsupervised learning theory, representation learning theory
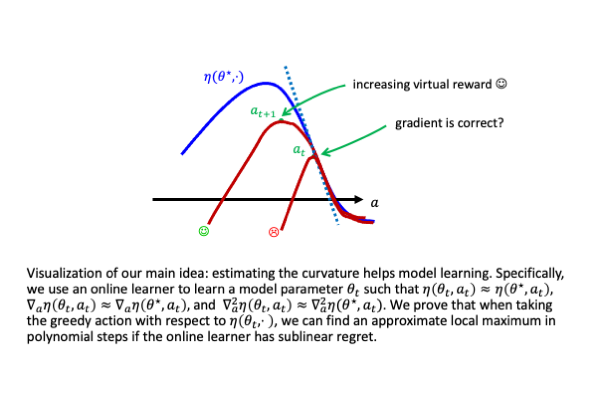
Authors: Kefan Dong, Jiaqi Yang, Tengyu Ma
Contact: kefandong@stanford.edu
Links: Paper | Video
Keywords: nonlinear bandits, online learning, deep reinforcement learning theory, sequential rademacher complexity
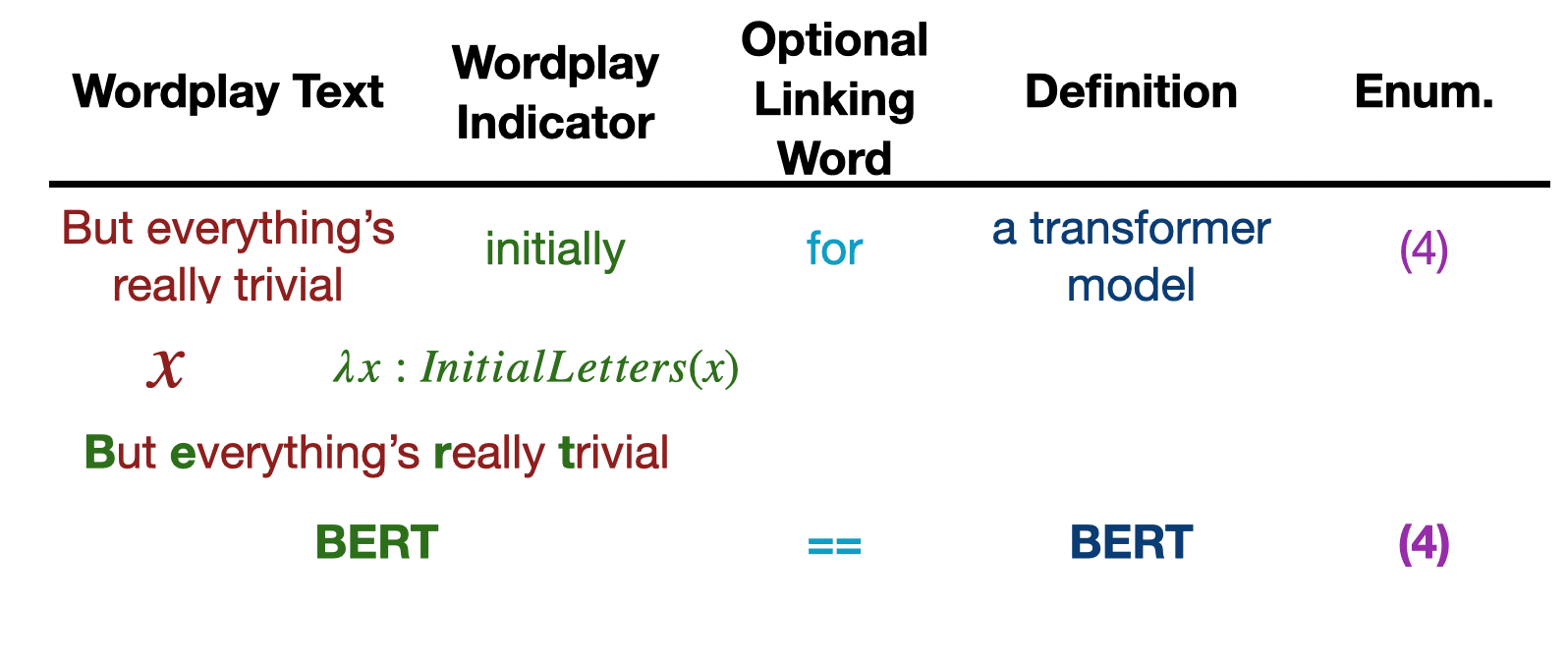
Authors: Joshua Rozner, Christopher Potts, Kyle Mahowald
Contact: rozner@stanford.edu
Links: Paper | Website
Keywords: compositionality in language, curriculum learning, meta-linguistics, systematicity, generalization
Authors: Andrea Zanette*, Kefan Dong*, Jonathan Lee*, Emma Brunskill
Contact: zanette@berkeley.edu
Links: Paper
Keywords: linear bandits, design of experiments
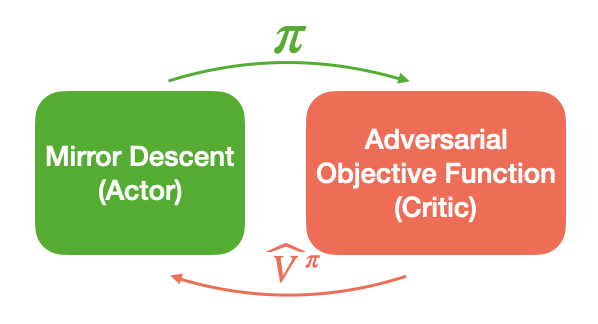
Authors: Andrea Zanette, Martin J. Wainwright, Emma Brunskill
Contact: zanette@berkeley.edu
Links: Paper
Keywords: offline rl, mirror descent, bellman closure
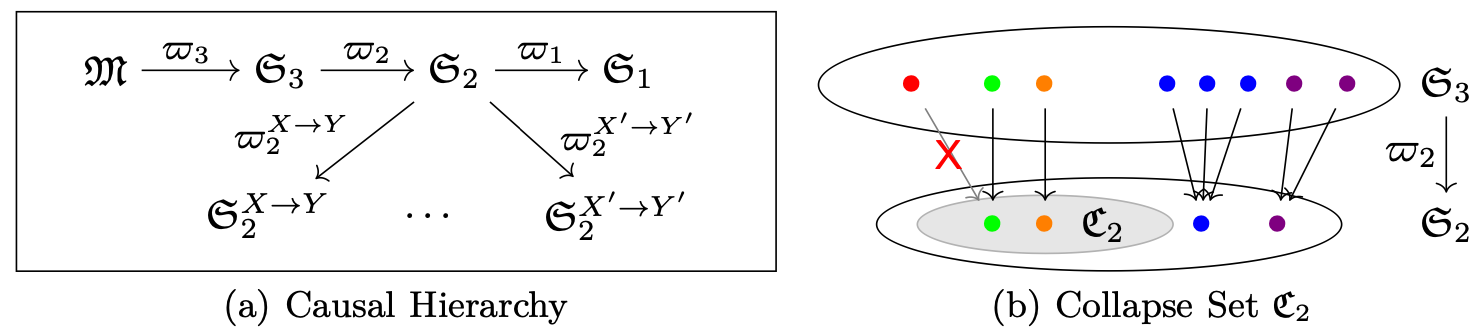
Authors: Duligur Ibeling, Thomas Icard
Contact: icard@stanford.edu
Links: Paper
Keywords: causal inference, topological learning theory
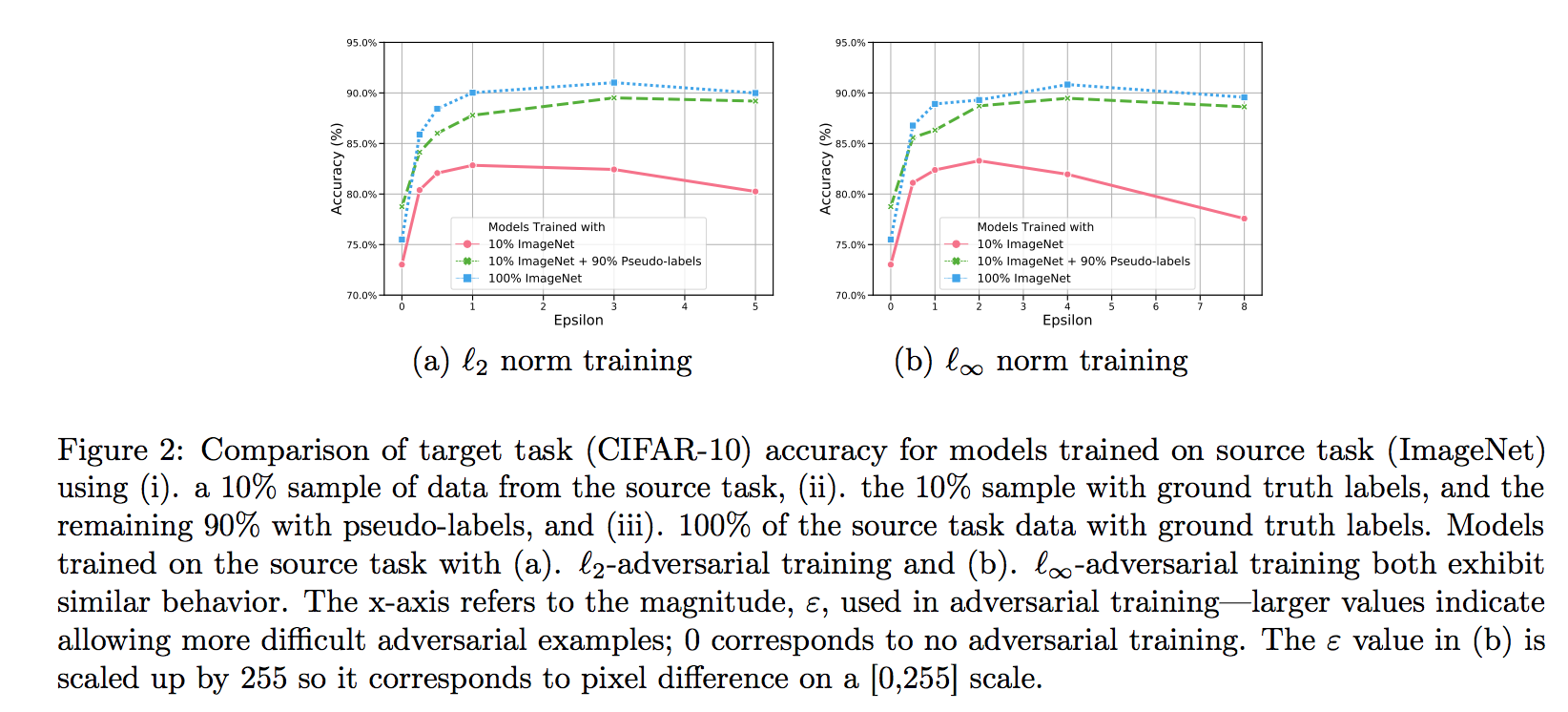
Authors: Zhun Deng, Linjun Zhang, Kailas Vodrahalli, Kenji Kawaguchi, James Zou
Contact: jamesyzou@gmail.com
Links: Paper
Keywords: transfer learning, adversarial training
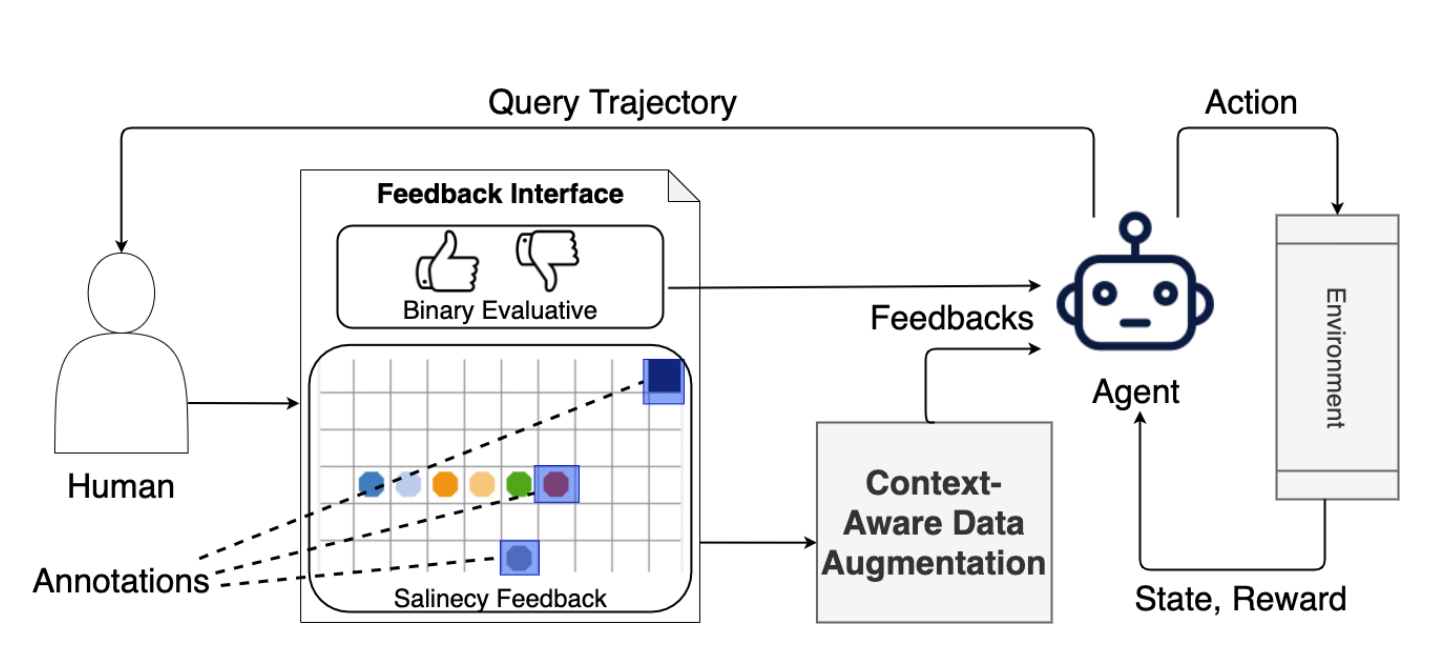
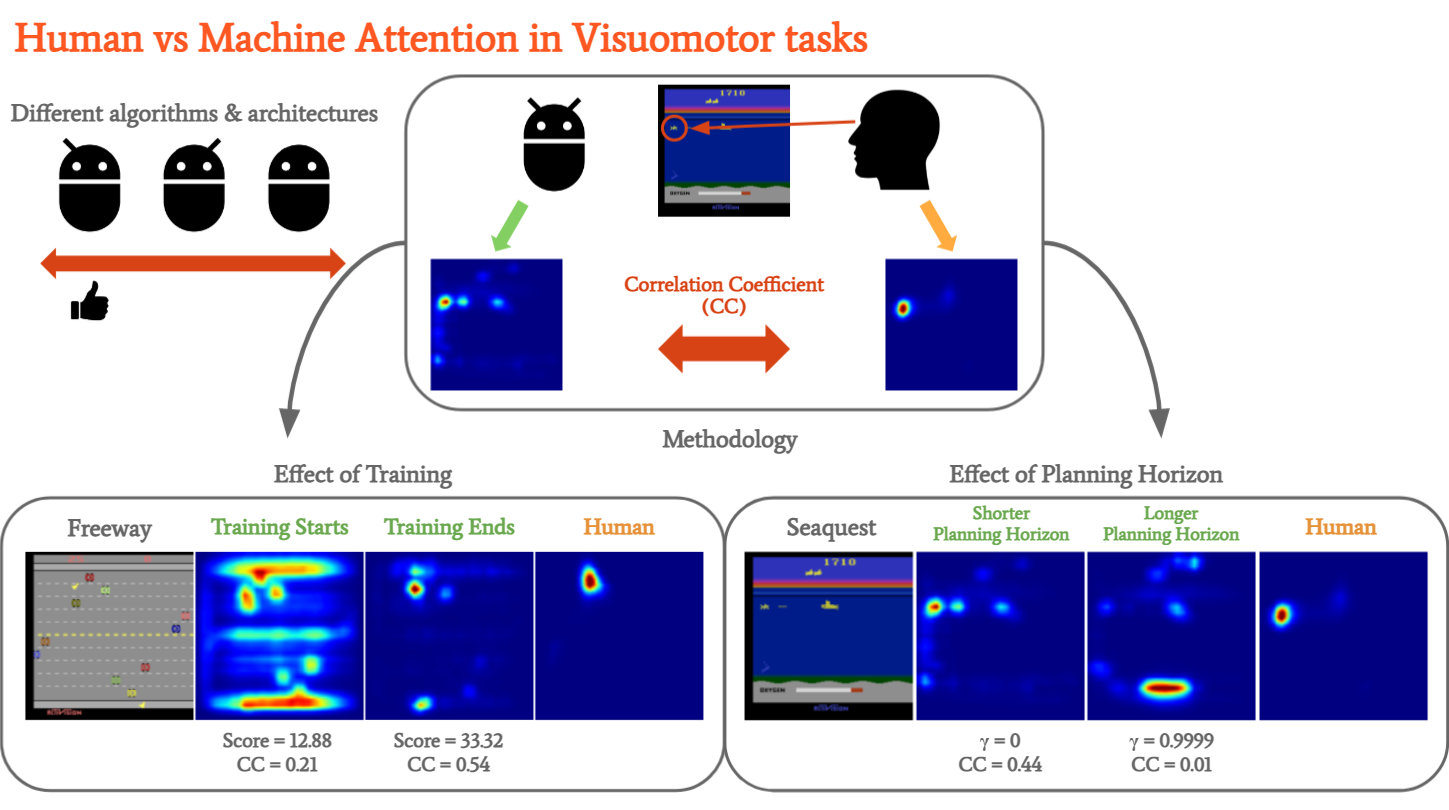
Authors: Lin Guan,Mudit Verma,Sihang Guo,Ruohan Zhang,Subbarao Kambhampati
Contact: zharu@stanford.edu
Award nominations: Spotlight
Links: Paper | Website
Keywords: human-in-the-loop reinforcement learning, evaluative feedback, saliency map, visual explanation
Authors: Sihang Guo, Ruohan Zhang, Bo Liu, Yifeng Zhu, Dana Ballard, Mary Hayhoe, Peter Stone
Contact: zharu@stanford.edu
Links: Paper
Keywords: deep reinforcement learning, interpretability, attention, eye tracking
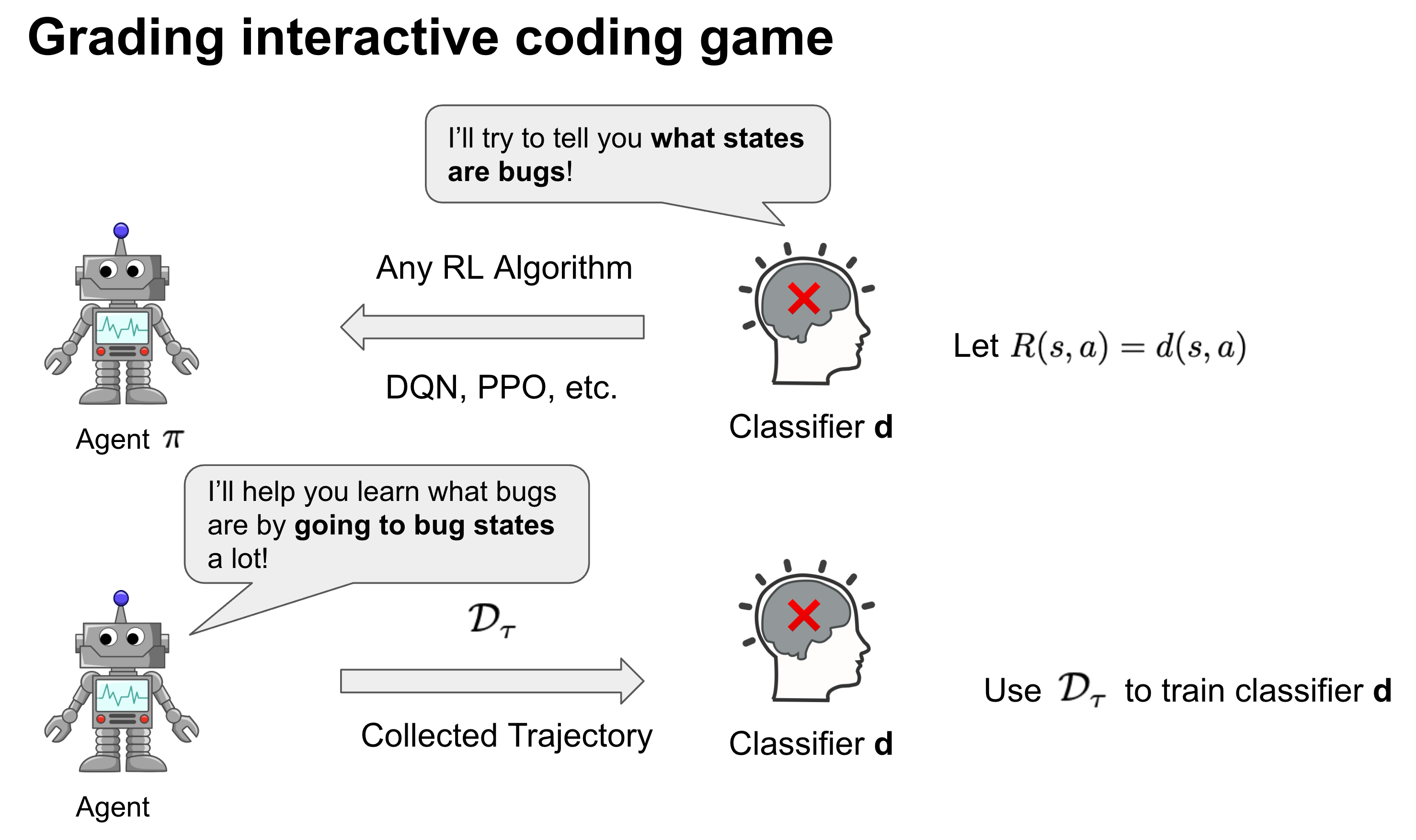
Authors: Allen Nie, Emma Brunskill, Chris Piech
Contact: anie@stanford.edu
Links: Paper | Website
Keywords: reinforcement learning, computational education, collaborative training, markov decision process
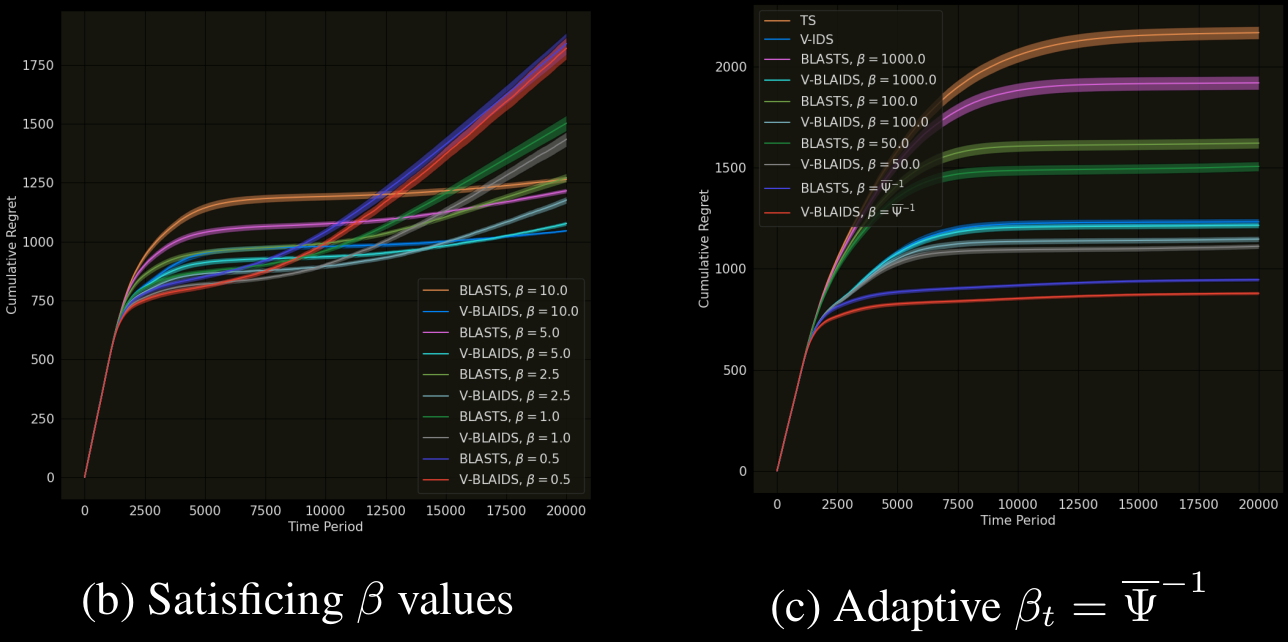
Authors: Dilip Arumugam, Benjamin Van Roy
Contact: dilip@cs.stanford.edu
Links: Paper
Keywords: exploration, information theory, multi-armed bandits, reinforcement learning
[Diversity Matters When Learning From Ensembles](https://papers.nips.cc/paper/2021/hash/466473650870501e3600d9a1b4ee5d44-Abstract.html
https://arxiv.org/abs/2110.14149)
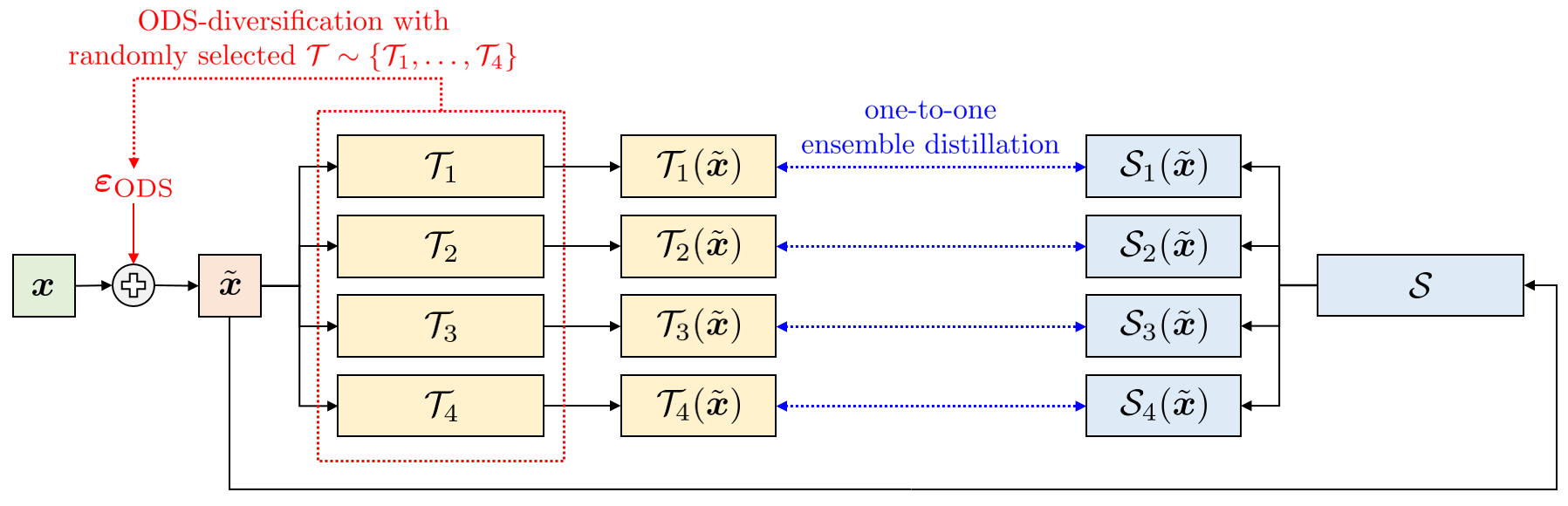
Authors: Giung Nam*, Jongmin Yoon*, Yoonho Lee, Juho Lee
Contact: yoonho@cs.stanford.edu
Links: [Paper](https://papers.nips.cc/paper/2021/hash/466473650870501e3600d9a1b4ee5d44-Abstract.html
https://arxiv.org/abs/2110.14149) | Website
Keywords: deep ensembles, knowledge distillation, calibration, output diversified sampling, batchensemble
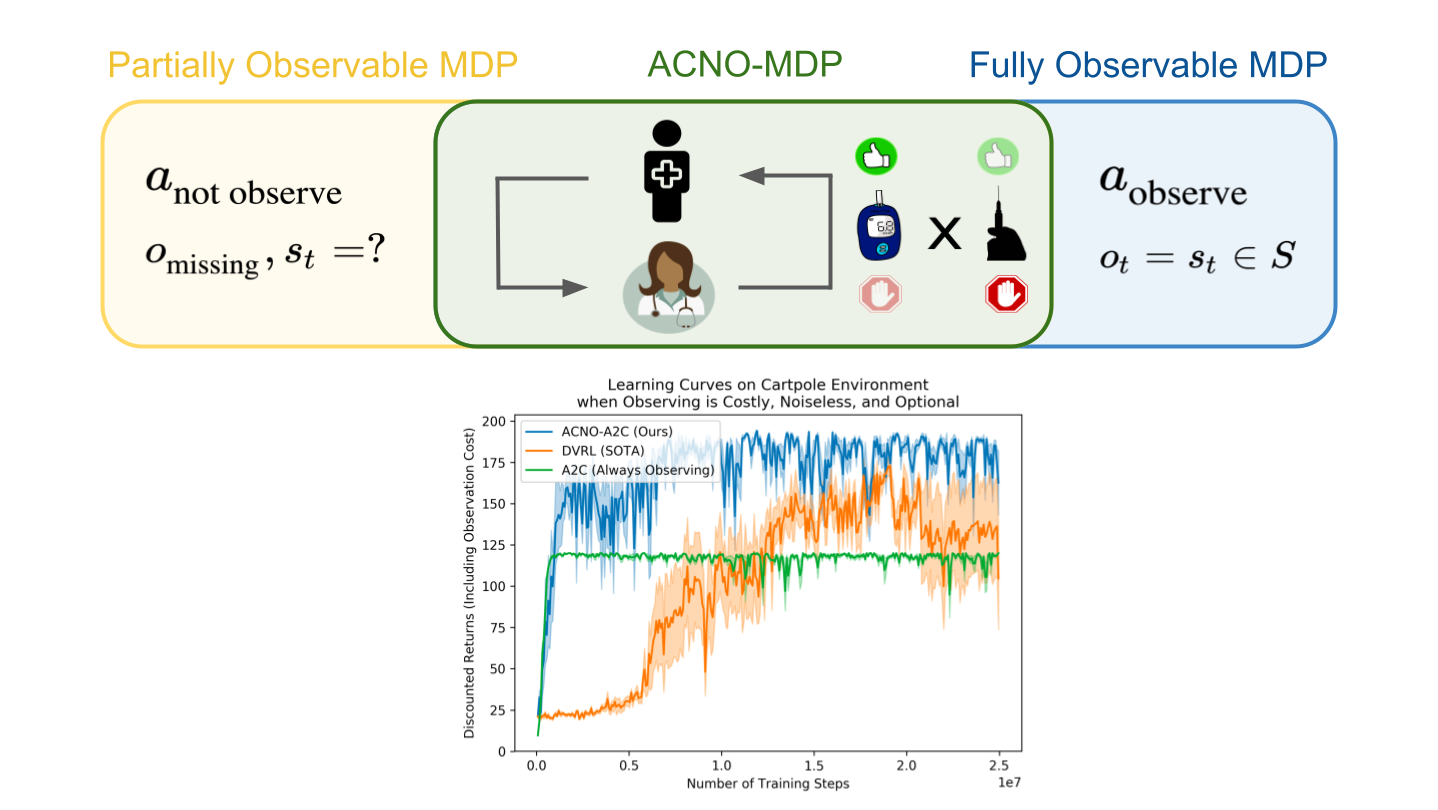
Authors: HyunJi Nam, Scott Fleming, Emma Brunskill
Contact: scottyf@stanford.edu
Links: Paper | Website
Keywords: reinforcement learning, observation cost, markov decision process, mdp, partially observable markov decision process, pomdp, probably approximately correct, pac, healthcare, health care
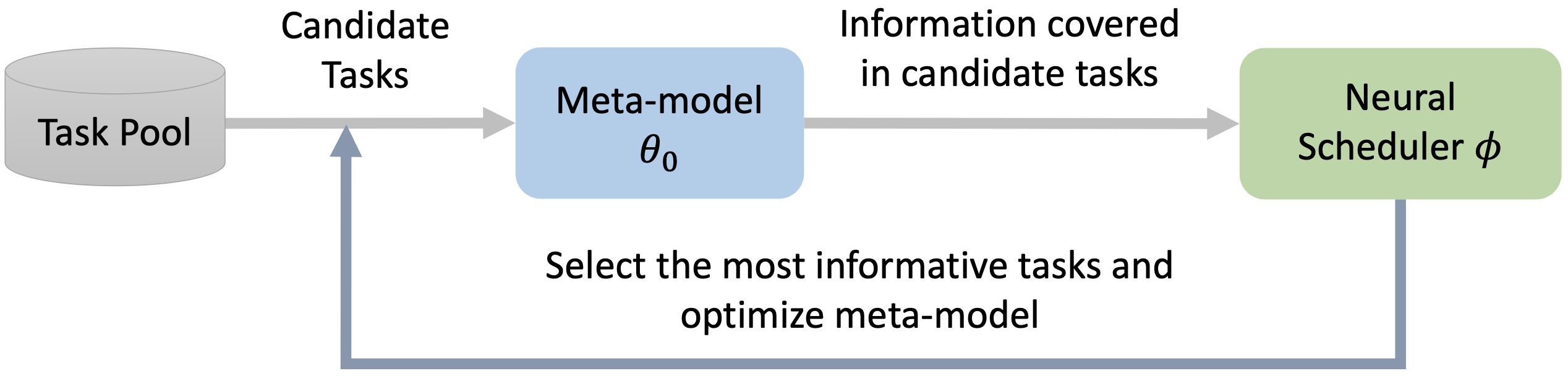
Authors: Huaxiu Yao, Yu Wang, Ying Wei, Peilin Zhao, Mehrdad Mahdavi, Defu Lian, Chelsea Finn
Contact: huaxiu@cs.stanford.edu
Links: Paper
Keywords: adaptive task scheduler, meta-learning, sampling
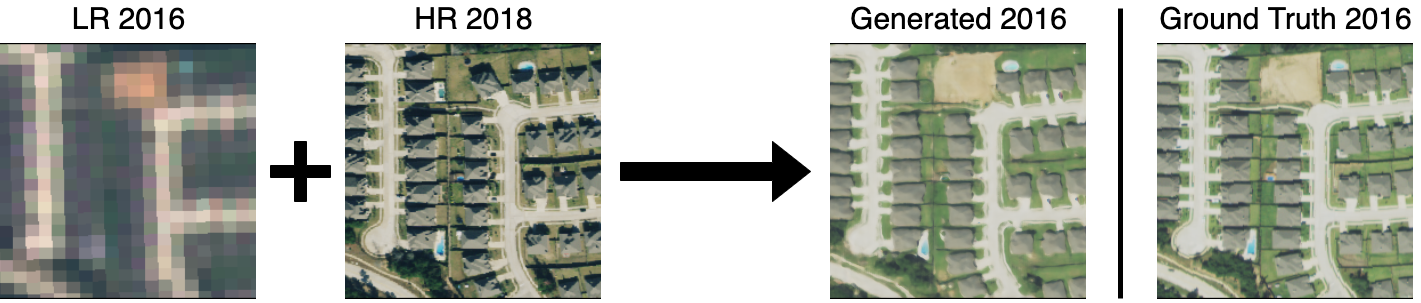
Authors: Yutong He, Dingjie Wang, Nicholas Lai, William Zhang, Chenlin Meng, Marshall Burke, David B. Lobell, Stefano Ermon
Contact: kellyyhe@stanford.edu
Links: Paper | Video | Website
Keywords: remote sensing, super-resolution, generative models
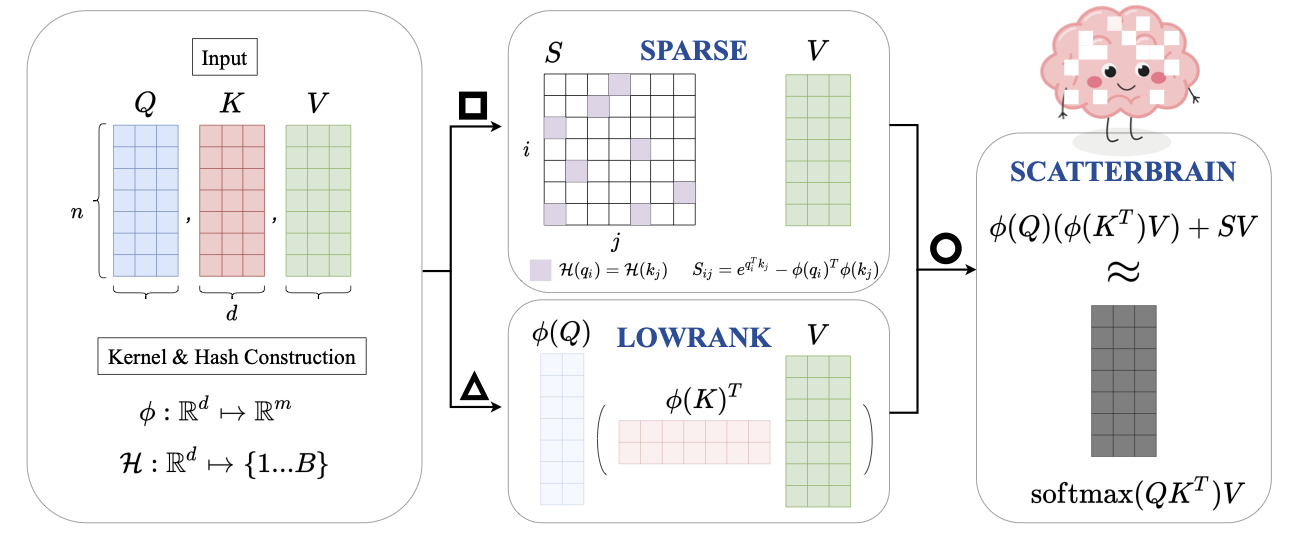
Authors: Beidi Chen*, Tri Dao*, Eric Winsor, Zhao Song, Atri Rudra, Christopher Ré.
Contact: trid@stanford.edu
Links: Paper
Keywords: efficient attention, sparse, low-rank
BCD Nets: Scalable Variational Approaches for Bayesian Causal Discovery
Authors: Chris Cundy, Aditya Grover, Stefano Ermon
Contact: cundy@stanford.edu
Keywords: causal inference, variational inference
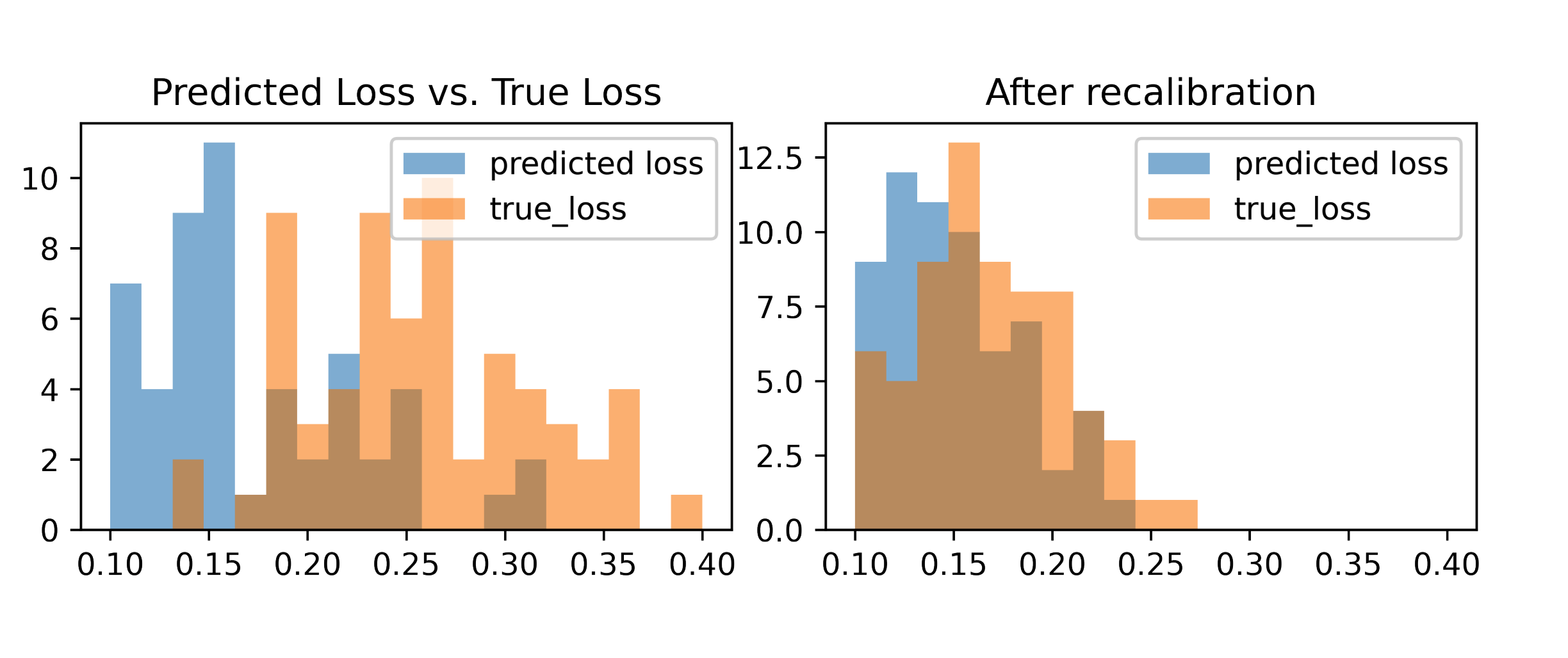
Authors: Shengjia Zhao, Michael P Kim, Roshni Sahoo, Tengyu Ma, Stefano Ermon
Contact: sjzhao@stanford.edu
Links: Paper
Keywords: calibration, decision making under uncertainty
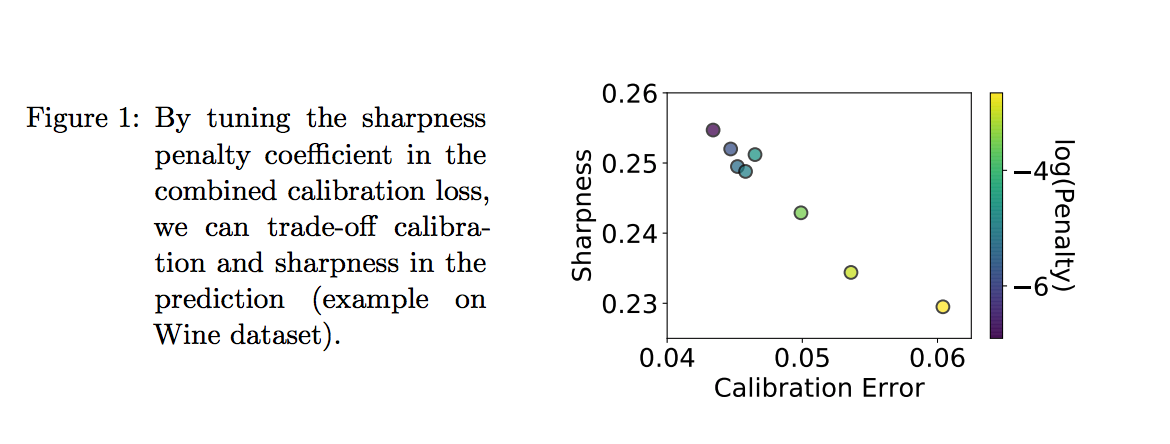
Authors: Youngseog Chung, Willie Neiswanger, Ian Char, Jeff Schneider
Contact: youngsec@andrew.cmu.edu, neiswanger@cs.stanford.edu
Links: Paper | Website
Keywords: uncertainty quantification, uq, quantile regression, pinball loss
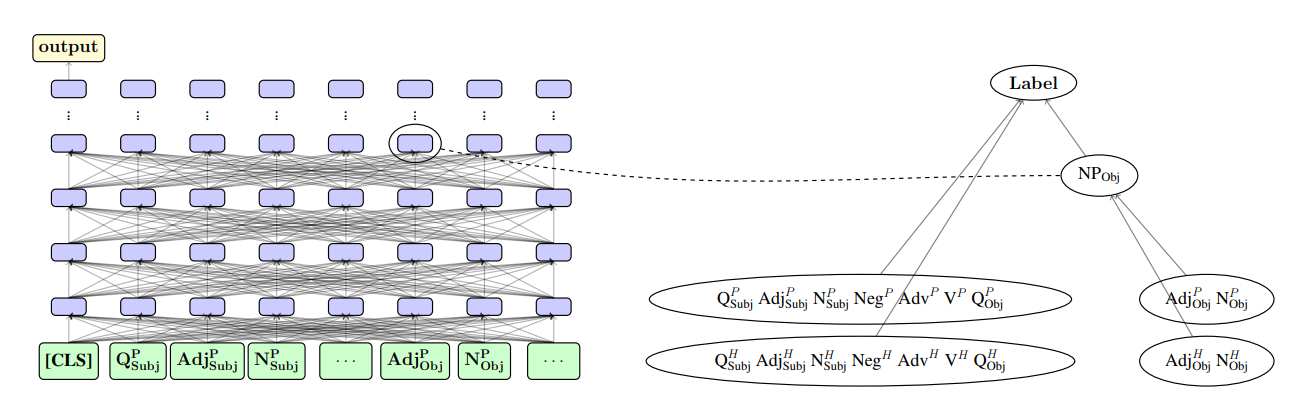
Authors: Atticus Geiger*, Hanson Lu*, Thomas Icard, Christopher Potts
Contact: atticusg@stanford.edu
Links: Paper
Keywords: interpretability, analysis, nlp, causality
Generalized Shape Metrics on Neural Representations
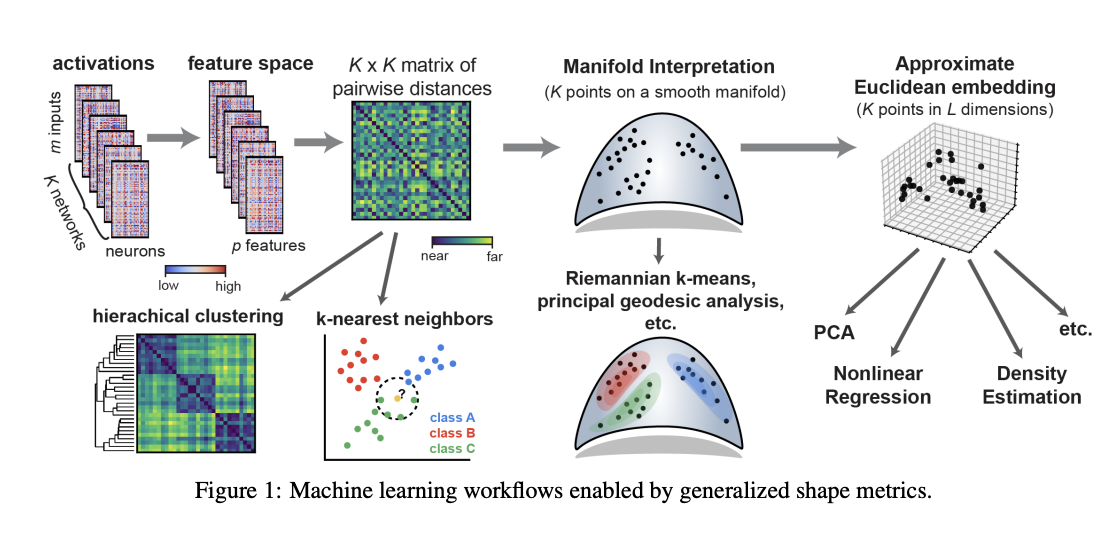
Authors: Alex H Williams, Erin Kunz, Simon Kornblith, Scott Linderman
Contact: alex.h.willia@gmail.com
Keywords: representational similarity analysis, neural representations, shape analysis, metric space
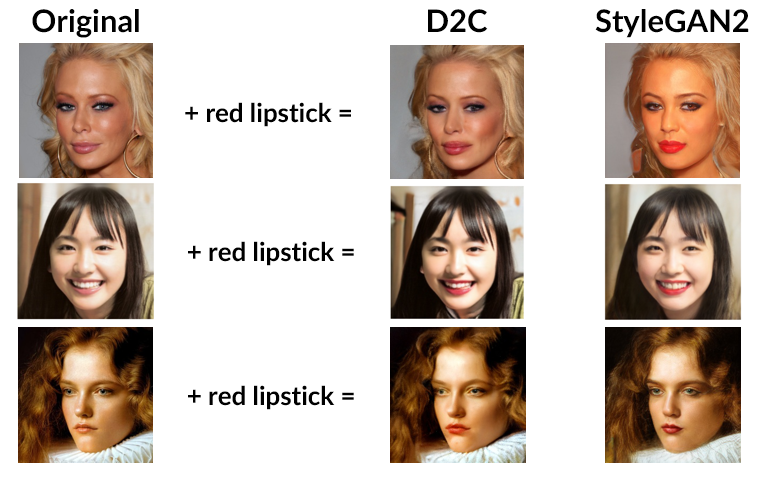
Authors: Abhishek Sinha*, Jiaming Song*, Chenlin Meng, Stefano Ermon
Contact: tsong@cs.stanford.edu
Links: Paper | Website
Keywords: generative modeling, contrastive learning, conditional generation
Authors: Hongyu Ren, Hanjun Dai, Zihang Dai, Mengjiao Yang, Jure Leskovec, Dale Schuurmans, Bo Dai
Contact: hyren@cs.stanford.edu
Links: Paper
Keywords: efficient transformer

Authors: Yang Song, Conor Durkan, Iain Murray, Stefano Ermon
Contact: yangsong@cs.stanford.edu
Award nominations: Spotlight presentation
Links: Paper
Keywords: score-based generative models, denoising score matching, diffusion models, maximum likelihood training
Contrastive Reinforcement Learning of Symbolic Reasoning Domains
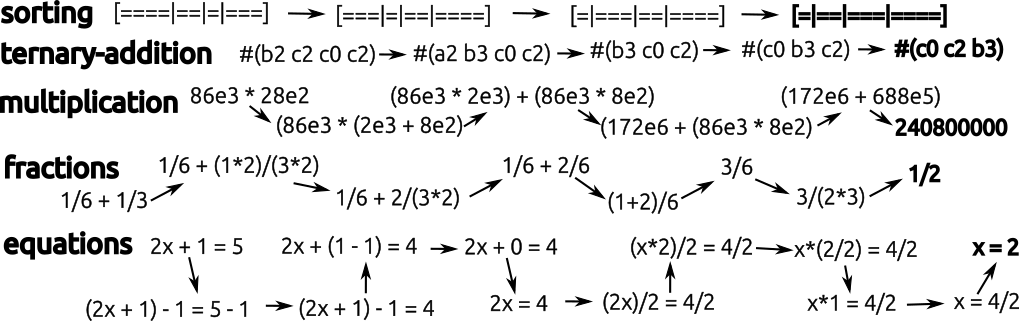
Authors: Gabriel Poesia, WenXin Dong, Noah Goodman
Contact: poesia@stanford.edu
Keywords: reinforcement learning, education, contrastive learning, symbolic reasoning
Authors: Isay Katsman, Aaron Lou, Derek Lim, Qingxuan Jiang, Ser Nam Lim, Christopher M. De Sa
Contact: aaronlou@stanford.edu
Links: Paper | Website
Keywords: manifold, normalizing flow, equivariant, invariant
Authors: Yin Tat Lee, Ruoqi Shen, Kevin Tian
Contact: kjtian@stanford.edu
Award nominations: Oral presentation
Links: Paper | Video
Keywords: sampling, lower bounds, langevin dynamics, hamiltonian monte carlo
Authors: Ilias Diakonikolas, Daniel M. Kane, Daniel Kongsgaard, Jerry Li, Kevin Tian
Contact: kjtian@stanford.edu
Award nominations: Spotlight presentation
Links: Paper
Keywords: robust statistics, semidefinite programming, mixture models
Authors: Arun Jambulapati, Jerry Li, Tselil Schramm, Kevin Tian
Contact: kjtian@stanford.edu
Links: Paper
Keywords: robust statistics, regression, generalized linear models, acceleration, sum of squares methods
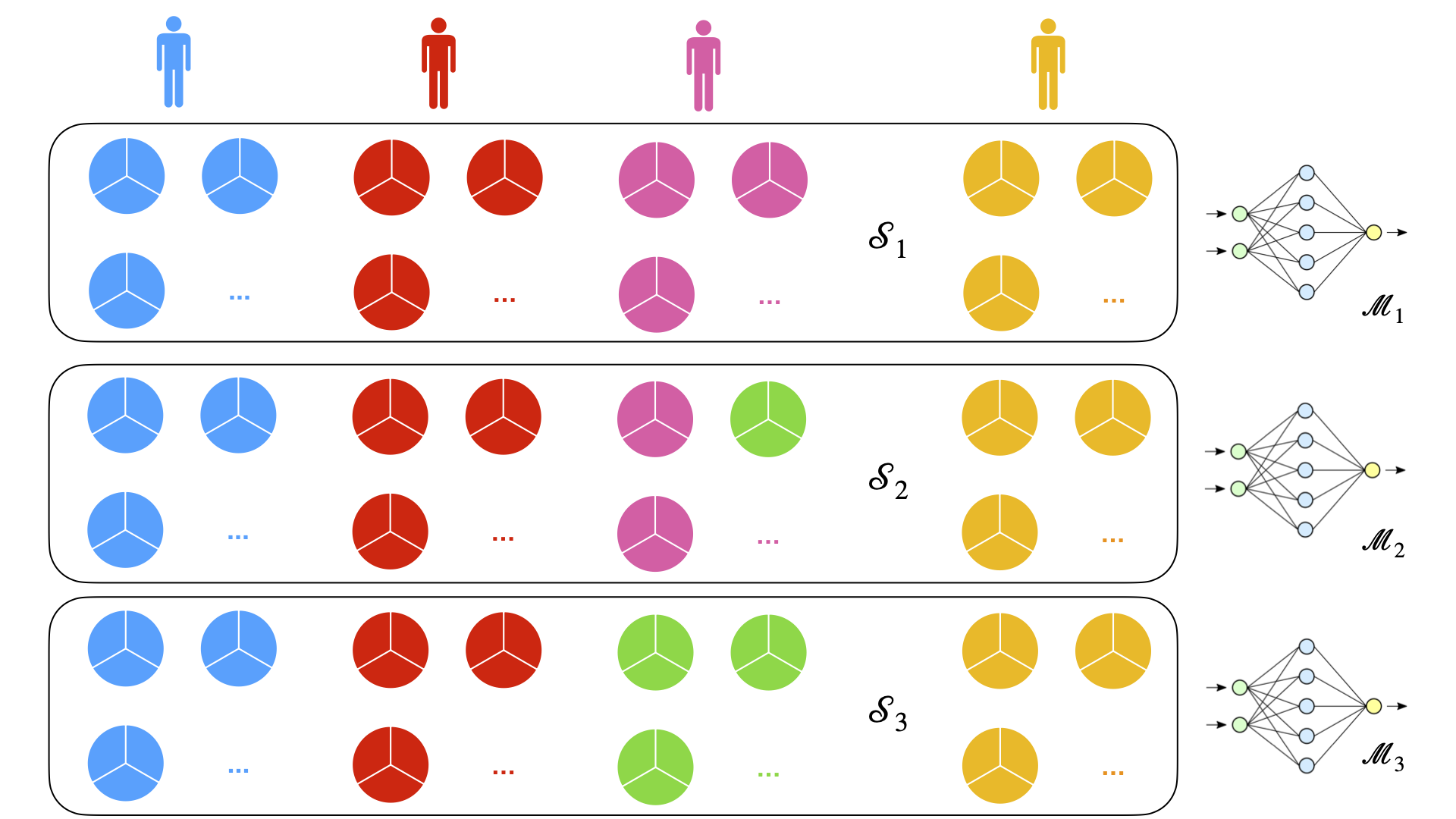
Authors: Daniel Levy*, Ziteng Sun*, Kareem Amin, Satyen Kale, Alex Kulesza, Mehryar Mohri, Ananda Theertha Suresh
Contact: danilevy@stanford.edu
Links: Paper
Keywords: differential privacy user-level
Authors: Hilal Asi*, Daniel Levy*, John C. Duchi
Contact: asi@stanford.edu
Links: Paper
Keywords: differential privacy adaptivity optimization
Authors: Kuno Kim, Akshat Jindal, Yang Song, Jiaming Song, Yanan Sui, Stefano Ermon
Contact: khkim@cs.stanford.edu
Links: Paper
Keywords: rl; imitation learning; density estimation
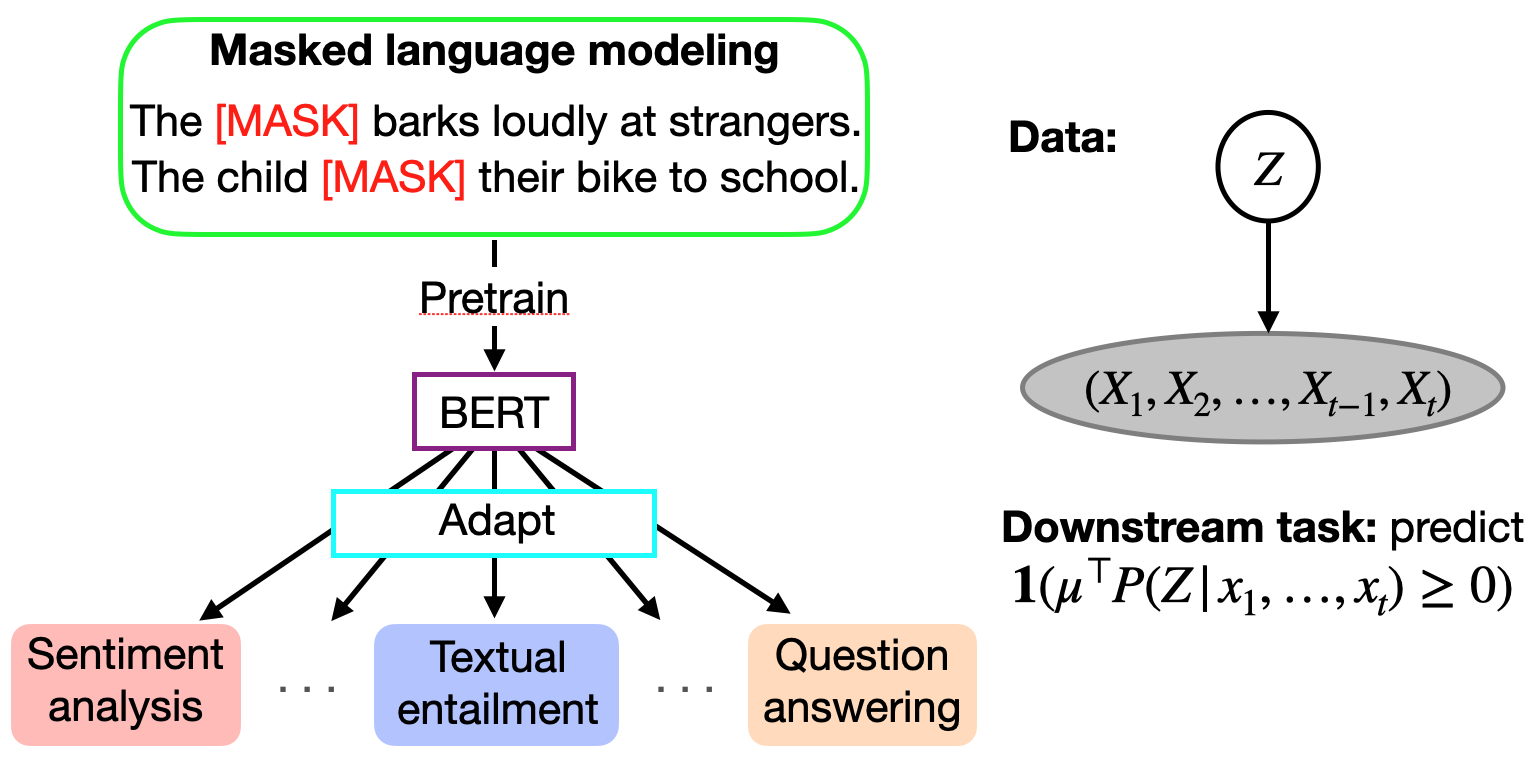
Authors: Colin Wei, Sang Michael Xie, Tengyu Ma
Contact: colinwei@stanford.edu
Links: Paper
Keywords: nlp pretraining, theoretical analysis
Authors: Garrett Thomas, Yuping Luo, Tengyu Ma
Contact: gwthomas@stanford.edu
Links: Paper
Keywords: safe exploration, model-based rl
Authors: Lantao Yu, Jiaming Song, Yang Song, Stefano Ermon
Contact: lantaoyu@cs.stanford.edu
Links: Paper
Keywords: deep generative models, energy-based models, proper scoring rules
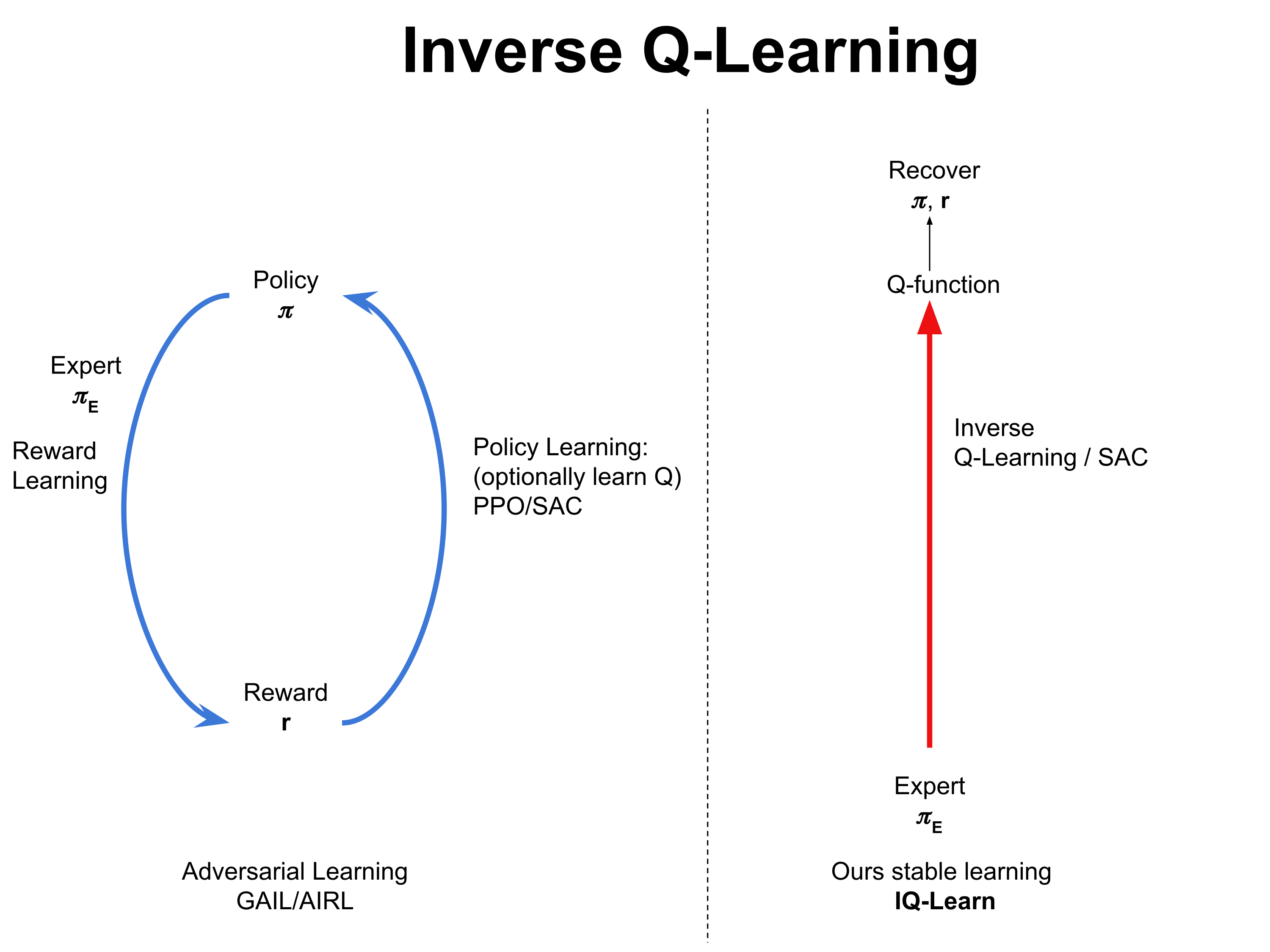
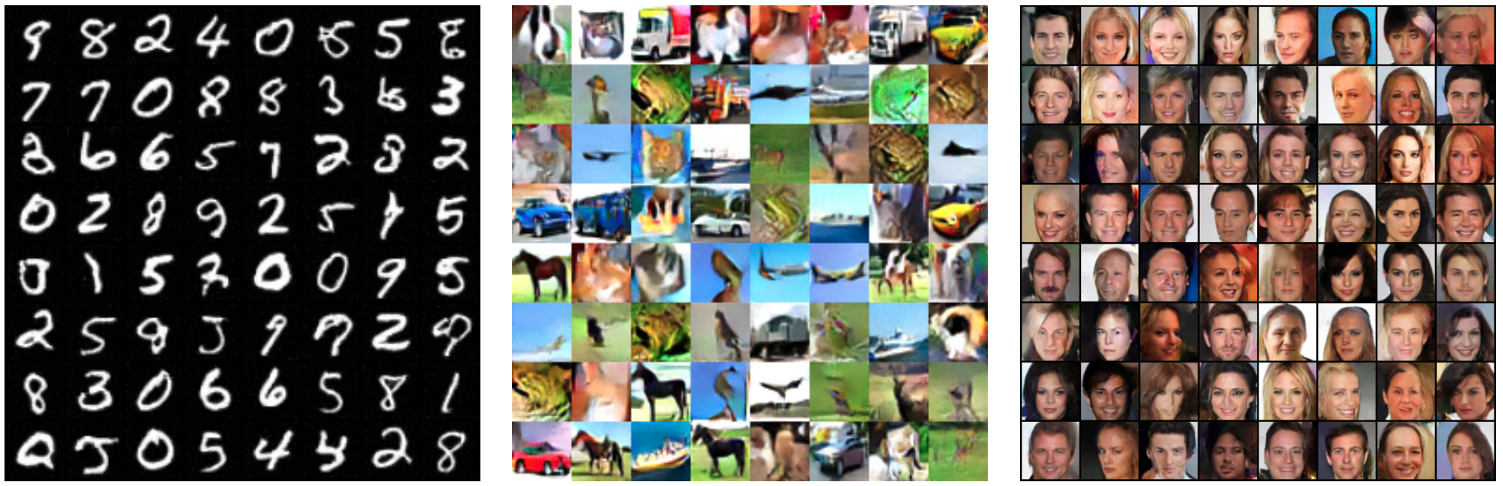
Authors: Divyansh Garg, Shuvam Chakraborty, Chris Cundy, Jiaming Song, Stefano Ermon
Contact: divgarg@stanford.edu
Award nominations: Spotlight
Links: Paper | Website
Keywords: reinforcement learning, imitation learning, inverse reinforcement learning, statistical learning, energy-based models
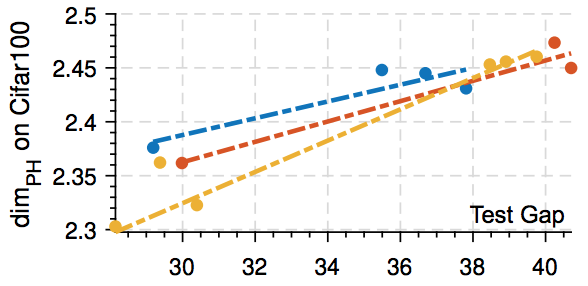
Authors: Tolga Birdal ~Tolga_Birdal3 , Aaron Lou, Leonidas Guibas, Umut Simsekli
Contact: aaronlou@stanford.edu
Links: Paper | Website
Keywords: generalization, persistent homology, intrinsic dimension, deep networks
Authors: Omar Khattab, Christopher Potts, Matei Zaharia
Contact: okhattab@stanford.edu
Award nominations: Spotlight paper
Links: Paper | Blog Post
Keywords: neural retrieval, multi-hop question answering, claim verification, reasoning, colbert
Datasets and Benchmarks Track
-
ReaSCAN: Compositional Reasoning in Language Grounding | Website by Zhengxuan Wu*, Elisa Kreiss*, Desmond Ong, Christopher Potts
-
ATOM3D: Tasks on Molecules in Three Dimensions | Website by Raphael J.L. Townshend, Martin Vögele, Patricia Suriana, Alexander Derry, Alexander S. Powers, Yianni Laloudakis, Sidhika Balachandar, Bowen Jing, Brandon Anderson, Stephan Eismann, Risi Kondor, Russ B. Altman, Ron O. Dror
-
Dynamic Environments with Deformable Objects | Video | Website by Rika Antonova, Peiyang Shi, Hang Yin, Zehang Weng, Danica Kragic
-
Personalized Benchmarking with the Ludwig Benchmarking Toolkit | Website by Avanika Narayan, Piero Molino, Karan Goel, Willie Neiswanger, Christopher Ré
-
SKM-TEA: A Dataset for Accelerated MRI Reconstruction with Dense Image Labels for Quantitative Clinical Evaluation | Website by Arjun D Desai, Andrew M Schmidt, Elka B Rubin, Christopher M Sandino, Marianne S Black, Valentina Mazzoli, Kathryn J Stevens, Robert Boutin, Christopher Ré, Garry E Gold, Brian A Hargreaves, Akshay S Chaudhari
-
Are We Learning Yet? A Meta Review of Evaluation Failures Across Machine Learning by Thomas Liao, Rohan Taori, Inioluwa Deborah Raji, Ludwig Schmidt
-
DABS: a Domain-Agnostic Benchmark for Self-Supervised Learning | Website by Alex Tamkin, Vincent Liu, Rongfei Lu, Daniel Fein, Colin Schultz, Noah Goodman
-
SustainBench: Benchmarks for Monitoring the Sustainable Development Goals with Machine Learning | Video | Website by Christopher Yeh, Chenlin Meng, Sherrie Wang, Anne Driscoll, Erik Rozi, Patrick Liu, Jihyeon Lee, Marshall Burke, David Lobell, Stefano Ermon
-
OGB-LSC: A Large-Scale Challenge for Machine Learning on Graphs | Website by Weihua Hu
Workshops
This year, multiple members of the SAIL community are also involved in great workshops that will take place on Dec 13-14. We hope you’ll check them out!

Organizers: Namrata Anand, Bonnie Berger, Wouter Boomsma, Erika DeBenedictis, Stephan Eismann, John Ingraham, Sergey Ovchinnikov, Roshan Rao, Raphael Townshend and Ellen Zhong

Organizers: Steven Y. Feng, Drew A. Hudson, Anusha Balakrishnan, Varun Gangal, Dongyeop Kang, Tatsunori Hashimoto and Joel Tetreault

Organizers: Shiori Sagawa, Pang Wei Koh, Fanny Yang, Hongseok Namkoong, Jiashi Feng, Kate Saenko, Percy Liang, Sarah Bird and Sergey Levine

Organizers: Andrew Ng, Lora Aroyo, Cody Coleman, Greg Diamos, Vijay Janapa Reddi, Joaquin Vanschoren,Carole-Jean Wu and Sharon Zhou
Organizers: Krishna Murthy Jatavallabhula, Rika Antonova, Kevin Smith, Hsiao-Yu (Fish) Tung, Florian Shkurti, Jeannette Bohg and Josh Tenenbaum
Workshop Papers
-
How Does Contrastive Pre-training Connect Disparate Domains? by Kendrick Shen*, Robbie Jones*, Ananya Kumar*, Sang Michael Xie*, Percy Liang (DistShift Workshop)
-
Optimal Representations for Covariate Shifts by Yann Dubois, Yangjun Ruan, Chris J. Maddison (DistShift Workshop)
- [Correct-N-Contrast: a Contrastive Approach for Improving Robustness to Spurious Correlations] by Michael Zhang, Nimit S. Sohoni, Hongyang R. Zhang, Chelsea Finn, Christopher Ré (DistShift Workshop)
- Calibrated Ensembles: A Simple Way to Mitigate ID-OOD Accuracy Tradeoffs by Ananya Kumar, Aditi Raghunathan, Tengyu Ma, Percy Liang (DistShift Workshop)
-
Sharp Bounds for Federated Averaging (Local SGD) and Continuous Perspective by Margalit Glasgow*, Honglin Yuan*, Tengyu Ma (New Frontiers in Federated Learning)
-
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation | Blog Post | Video | Website by Ajay Mandlekar, Danfei Xu, Josiah Wong, Soroush Nasiriany, Chen Wang, Rohun Kulkarni, Li Fei-Fei, Silvio Savarese, Yuke Zhu, Roberto Martín-Martín (Offline Reinforcement Learning Workshop)
-
An Algorithmic Theory of Metacognition in Minds and Machines | Blog Post by Rylan Schaeffer (Metacognition in the Age of AI: Challenges and Opportunities)
-
Beyond Ads: Sequential Decision-Making Algorithms in Public Policy by Peter Henderson, Ben Chugg, Brandon Anderson, Daniel E. Ho (Workshop on Causal Inference Challenges in Sequential Decision Making)
-
Tracking Urbanization in Developing Regions withRemote Sensing Spatial-Temporal Super-Resolution by Yutong He*, William Zhang*, Chenlin Meng, Marshall Burke, David B. Lobell, Stefano Ermon (Workshop on Machine Learning for the Developing World (ML4D))
-
Likelihood-free Density Ratio Acquisition Functions are not Equivalent to Expected Improvements by Jiaming Song, Stefano Ermon (Bayesian Deep Learning Workshop)
-
Exploiting Proximity Search and Easy Examples to Select Rare Events by Daniel Kang, Alex Derhacobian, Kaoru Tsuji, Trevor Hebert, Peter Bailis, Tadashi Fukami, Tatsunori Hashimoto, Yi Sun, Matei Zaharia (Data Centric AI workshop)
We look forward to seeing you at NeurIPS 2021!
Read More







 Sama Bali is a Product Marketing Manager within the AWS AI Services team.
Sama Bali is a Product Marketing Manager within the AWS AI Services team. Jordan Gruber is a Product Manager-Technical within the AWS AI-DevOps team.
Jordan Gruber is a Product Manager-Technical within the AWS AI-DevOps team.




